
Watch Robo Erectus: Evolution of W1 Quadruped Robot into Upright Walker
While having four legs with wheels might seem quite functional for a robot, China's LimX Dynamics is pushing boundaries. Their W1 quadruped robot has advanced to the point where it can now stand up and walk on two "feet."
Just last October marked our initial introduction to the W1, evidently drawing inspiration from ETH-Zurich's Swiss-Mile Robot design. Similar to its counterpart, the W1 features four legs, each equipped with a powered wheel at its extremity.[1]

Figure 1. The W1 quadruped robot can now stand, walk and roll on its hind legs.
Figure 1 shows the W1 quadruped robot can now stand, walk and roll on its hind legs. When navigating smooth surfaces like roads, sidewalks, or floors, the W1 smoothly rolls along on its wheels, maximizing both speed and energy efficiency. However, when faced with obstacles, rough terrain, or the need to ascend or descend stairs, it halts and immobilizes its wheels. It then transforms them into feet, adopting a quadruped walking motion.
What previously distinguished the Swiss-Mile from the W1 was its ability to assume a humanoid form for specific tasks, like handing or receiving packages, by standing up and either walking or rolling on its hind legs. Now, the W1 boasts this capability as well.
While specific technical specifications are currently limited, it's worth noting that when in rolling mode, the upright robot possesses the ability to rotate 360 degrees on the spot, execute 90-degree turns, manoeuvre through obstacles like shelving units, and withstand collisions without toppling over.[2]
Additionally, the transition from quadruped to biped mode occurs in under one second, reaching a full upright stance at a height of 152 cm (59.8 inches).
In a recently unveiled video, LimX exclusively showcases the W1 walking on two feet across a seamless floor. This prompts questions about its bipedal stair-climbing abilities, akin to the company's CL-1 humanoid robot, or if it necessitates reverting to all fours for such tasks. Additionally, clarity on whether the robot can execute actions like grasping items with its front legs while standing, mirroring the capabilities of the Swiss-Mile bot, would be beneficial.
Reference:
- https://newatlas.com/robotics/limx-w1-quadruped-robot-stands-walks/
- https://www.youtube.com/watch?v=p1g5kk2qD4E&t=48s
Cite this article:
Gokila G (2024), Watch Robo Erectus: Evolution of W1 Quadruped Robot into Upright Walker, AnaTechMaz , pp .27
Recent Post
-

The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable.,..
-
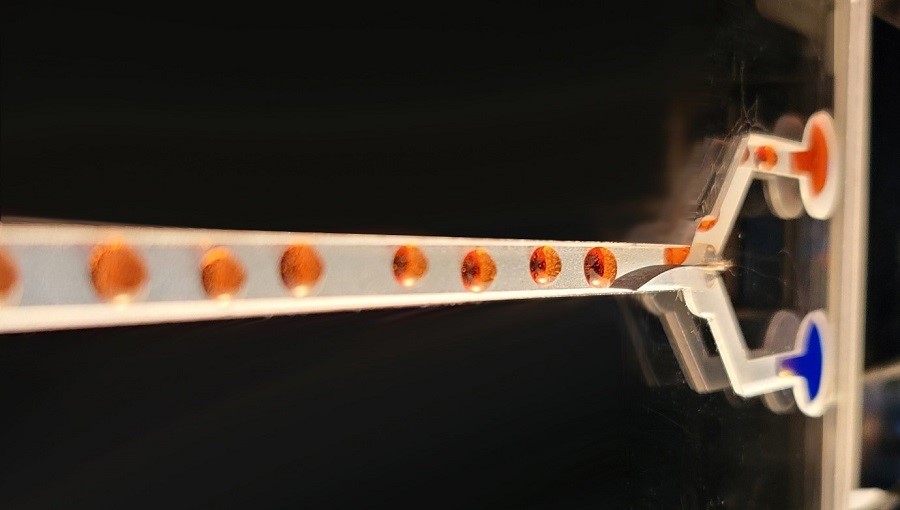
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea Advanced Institute of Science ....
-
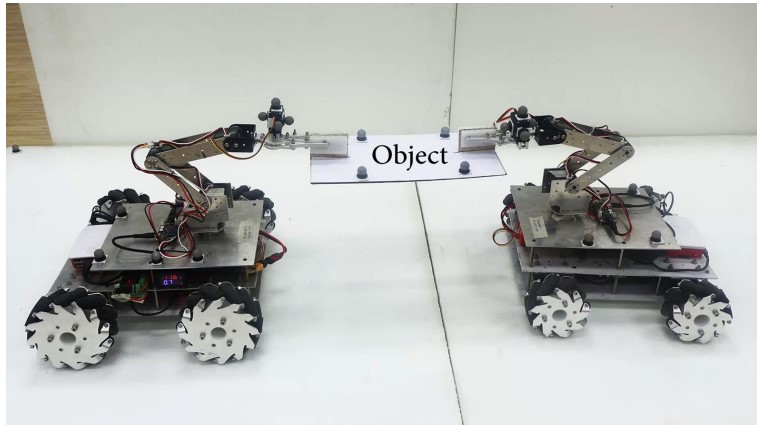
IIT Bombay Study Proposes Innovations for Enhanced Robot Cooperation
Novel algorithms have been developed to enhance cooperation among...
-

Northwestern University Introduces MaxDiff RL Algorithm
Engineers at Northwestern University have unveiled a groundbreaking...
-

Milestone Achievement: UZ Brussel Conducts Groundbreaking Dual Robotic Surgery for Patient with Post-Breast Surgery Lymphoedema
In a groundbreaking surgery conducted on Wednesday...
-
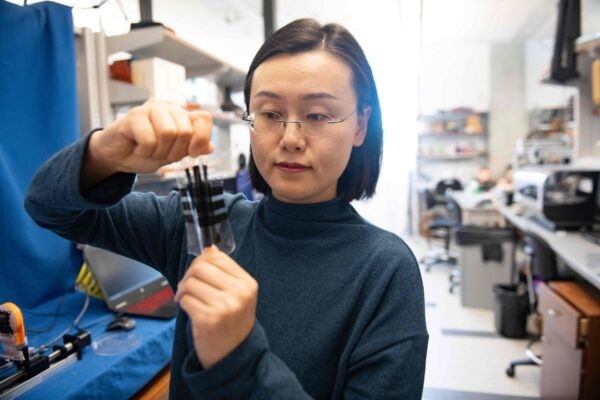
Revolutionizing Robotics with Stretchy Electronic Skin
Researchers at The University of Texas at Austin have...
-
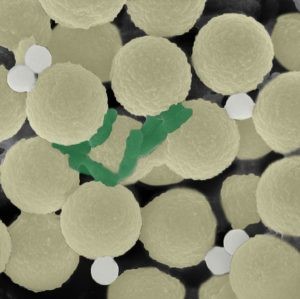
Harnessing Microrobots to Combat Plastic Pollution and Bacterial Contamination in Water
In our modern world, the proliferation of plastic waste poses a...
-

Autonomous Flight Within a Collective Swarm
Festo's Bionic Learning Network has consistently dazzled us with their...
-

The 4K Drone Is Equipped with Dual Cameras and Advanced Obstacle Avoidance Technology
In short, this $70 4K Dual-Camera Drone, equipped with user-...
-

Introducing The DAL-E Delivery Robot: Hyundai Motor and Kia's Innovation in Indoor Autonomous Delivery Services
SEOUL, April 3, 2024 – Hyundai Motor Company (Hyundai Motor)...
-

A Robot Capable of Engaging in Video Games Alongside Humans
Over the past few years, engineers have created a diverse array...
-
Watch Robo Erectus: Evolution of W1 Quadruped Robot into Upright Walker
While having four legs with wheels might seem quite functional ...
-
Easier Management for Shape-Shifting Robots
Imagine formless 'slime' robots dynamically altering their shape to...
-

Watch $16k G1 Humanoid Robot Masterfully Crack Nuts, Twist, And Twirl with Precision
The progress in humanoid development at Unitree, a Chinese ...
-
Robotic Mouse with Flexible Spine Moves with Greater Speed and Agility
Researchers have developed a 3D-printed mouse-like robot...