
IIT Bombay Study Proposes Innovations for Enhanced Robot Cooperation
Novel algorithms have been developed to enhance cooperation among autonomous robots by enabling real-time monitoring and dynamic task allocation. These algorithms, proposed by Keshab Patra and his team at the Indian Institute of Technology Bombay (IIT Bombay), under the guidance of Prof. Anirban Guha and Prof. Arpita Sinha [1], aim to improve efficiency by facilitating better communication and coordination among robots.
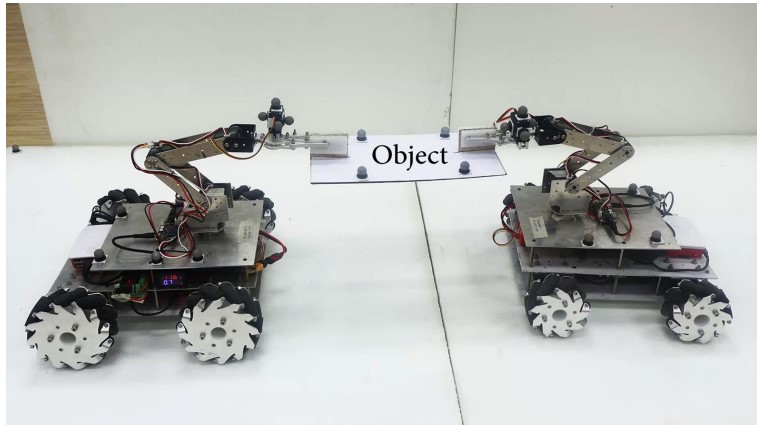
Figure 1. Enhanced Robot Cooperation. (Credit: IIT Bombay)
Figure 1 shows enhanced robot cooperation. In their recent study, the IIT Bombay team introduces three innovative algorithms that empower robots to assess their task capabilities in real-time and adjust task allocation accordingly based on their individual strengths and limitations [1]. These algorithms enable robots to identify changes in the environment or task requirements and make adjustments on-the-fly to optimize performance.
The first algorithm, TaskCapability, evaluates various parameters of each robot, such as grip strength and stability, assigning them values to assess their capabilities. The second algorithm, Online Task Capability, compares these parameters with those of other robots to identify underperforming ones [2]. Finally, the third algorithm, Online Task Allocator, utilizes data from the previous algorithms to determine the number of robots needed for a task and assign specific tasks to each robot accordingly.
By implementing these algorithms, robots can contribute according to their abilities, leading to increased productivity and efficiency in cooperative tasks [2]. Additionally, real-time communication between robots helps minimize errors and collisions, further enhancing their collaborative work.
Compared to conventional algorithms, which often rely on pre-programmed paths and limited real-time adjustments, the new algorithms offer significant improvements in speed and efficiency. Tests conducted on industrial robots like UR5 and Franka-Emika Panda demonstrated that the new algorithms outperformed conventional ones by a significant margin.
Furthermore, the new algorithms reduce computation time by 85%, enabling robots to make real-time adjustments during cooperative operations. This innovation has the potential to revolutionize task assignment and execution in complex automated systems, such as car assembly lines, by optimizing the use of each robot's unique capabilities.
Overall, the introduction of these real-time algorithms promises to enhance the performance of cooperative robots and pave the way for more efficient and adaptable automated systems in various industries.
Source: IIT Bombay
References:
- https://timelinedaily.com/technology/iit-bombay-conducts-study-to-enhance-cooperation-among-robots
- https://theprint.in/economy/iit-bombay-develops-technique-to-improve-efficiency-of-robots/2066379/
Cite this article:
Hana M (2024), IIT Bombay Study Proposes Innovations for Enhanced Robot Cooperation, AnaTechMaz, pp. 18
Recent Post
-

The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable.,..
-
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea Advanced Institute of Science ....
-
IIT Bombay Study Proposes Innovations for Enhanced Robot Cooperation
Novel algorithms have been developed to enhance cooperation among...
-

Northwestern University Introduces MaxDiff RL Algorithm
Engineers at Northwestern University have unveiled a groundbreaking...
-

Milestone Achievement: UZ Brussel Conducts Groundbreaking Dual Robotic Surgery for Patient with Post-Breast Surgery Lymphoedema
In a groundbreaking surgery conducted on Wednesday...
-
Revolutionizing Robotics with Stretchy Electronic Skin
Researchers at The University of Texas at Austin have...
-
Harnessing Microrobots to Combat Plastic Pollution and Bacterial Contamination in Water
In our modern world, the proliferation of plastic waste poses a...
-

Autonomous Flight Within a Collective Swarm
Festo's Bionic Learning Network has consistently dazzled us with their...
-

The 4K Drone Is Equipped with Dual Cameras and Advanced Obstacle Avoidance Technology
In short, this $70 4K Dual-Camera Drone, equipped with user-...
-

Introducing The DAL-E Delivery Robot: Hyundai Motor and Kia's Innovation in Indoor Autonomous Delivery Services
SEOUL, April 3, 2024 – Hyundai Motor Company (Hyundai Motor)...
-

A Robot Capable of Engaging in Video Games Alongside Humans
Over the past few years, engineers have created a diverse array...
-

Watch Robo Erectus: Evolution of W1 Quadruped Robot into Upright Walker
While having four legs with wheels might seem quite functional ...
-
Easier Management for Shape-Shifting Robots
Imagine formless 'slime' robots dynamically altering their shape to...
-

Watch $16k G1 Humanoid Robot Masterfully Crack Nuts, Twist, And Twirl with Precision
The progress in humanoid development at Unitree, a Chinese ...
-
Robotic Mouse with Flexible Spine Moves with Greater Speed and Agility
Researchers have developed a 3D-printed mouse-like robot...