
Northwestern University Introduces MaxDiff RL Algorithm
Engineers at Northwestern University have unveiled a groundbreaking artificial intelligence (AI) algorithm tailored for smart robotics. Named Maximum Diffusion Reinforcement Learning (MaxDiff RL), the algorithm focuses on facilitating rapid and reliable learning of complex skills by robots. This advancement has the potential to greatly enhance the functionality and safety of robots across various domains such as self-driving cars, delivery drones, household assistants, and automation.

Figure 1. NoodleBot. (Credit: Northwestern University)
Designed Randomness Enhances Learning
Figure 1 shows the researchers have only tested their new algorithm on simulated robots, they built NoodleBot for future testing in the real world [1]. The key to MaxDiff RL's success lies in its ability to encourage robots to explore their environments in a highly random manner to acquire a diverse set of experiences. This intentional randomness improves the quality of data collected by robots about their surroundings. As a result, simulated robots utilizing MaxDiff RL demonstrated faster and more efficient learning, leading to enhanced reliability and performance.
Outperforming State-of-the-Art Models
When compared to other AI platforms, simulated robots equipped with Northwestern's MaxDiff RL consistently surpassed state-of-the-art models. Notably, robots trained with this algorithm learned new tasks and executed them successfully on their first attempt, highlighting a significant improvement over current AI models that rely on slower trial-and-error learning.
Ensuring Consistency and Reliability
According to Thomas Berrueta, the lead researcher from Northwestern University, MaxDiff RL ensures consistent performance of robots, enhancing their interpretability and reliability. This reliability is crucial in a world increasingly dependent on AI technology.
Addressing the Disembodied Disconnect
Traditional machine learning algorithms rely on curated training data, which is not suitable for embodied AI systems like robots [2]. To bridge this gap, the researchers developed MaxDiff RL, which enables robots to collect high-quality data autonomously while exploring their environments.
MaxDiff RL in Action
Through computer simulations, researchers demonstrated that robots trained with MaxDiff RL outperformed other models by learning faster and executing tasks more consistently. Even more impressively, these robots often succeeded in performing tasks correctly on their first attempt, even with no prior knowledge.
Versatile Application Potential
As a general algorithm, MaxDiff RL holds promise for a wide range of applications beyond robotic vehicles, including stationary robots like robotic arms in kitchens. By addressing fundamental challenges in the field, this innovation lays the groundwork for reliable decision-making in smart robotics, ushering in a new era of advanced capabilities and applications.
Source: Northwestern University
References:
- https://www.nature.com/articles/s42256-024-00829-3
- https://interestingengineering.com/innovation/new-ai-powered-noodlebot-set-to-outperform-cutting-edge-robotic-systems
Cite this article:
Hana M (2024), Northwestern University Introduces MaxDiff RL Algorithm, AnaTechMaz, pp. 19
Recent Post
-

The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable.,..
-
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea Advanced Institute of Science ....
-
IIT Bombay Study Proposes Innovations for Enhanced Robot Cooperation
Novel algorithms have been developed to enhance cooperation among...
-
Northwestern University Introduces MaxDiff RL Algorithm
Engineers at Northwestern University have unveiled a groundbreaking...
-

Milestone Achievement: UZ Brussel Conducts Groundbreaking Dual Robotic Surgery for Patient with Post-Breast Surgery Lymphoedema
In a groundbreaking surgery conducted on Wednesday...
-
Revolutionizing Robotics with Stretchy Electronic Skin
Researchers at The University of Texas at Austin have...
-
Harnessing Microrobots to Combat Plastic Pollution and Bacterial Contamination in Water
In our modern world, the proliferation of plastic waste poses a...
-

Autonomous Flight Within a Collective Swarm
Festo's Bionic Learning Network has consistently dazzled us with their...
-

The 4K Drone Is Equipped with Dual Cameras and Advanced Obstacle Avoidance Technology
In short, this $70 4K Dual-Camera Drone, equipped with user-...
-

Introducing The DAL-E Delivery Robot: Hyundai Motor and Kia's Innovation in Indoor Autonomous Delivery Services
SEOUL, April 3, 2024 – Hyundai Motor Company (Hyundai Motor)...
-

A Robot Capable of Engaging in Video Games Alongside Humans
Over the past few years, engineers have created a diverse array...
-

Watch Robo Erectus: Evolution of W1 Quadruped Robot into Upright Walker
While having four legs with wheels might seem quite functional ...
-
Easier Management for Shape-Shifting Robots
Imagine formless 'slime' robots dynamically altering their shape to...
-

Watch $16k G1 Humanoid Robot Masterfully Crack Nuts, Twist, And Twirl with Precision
The progress in humanoid development at Unitree, a Chinese ...
-
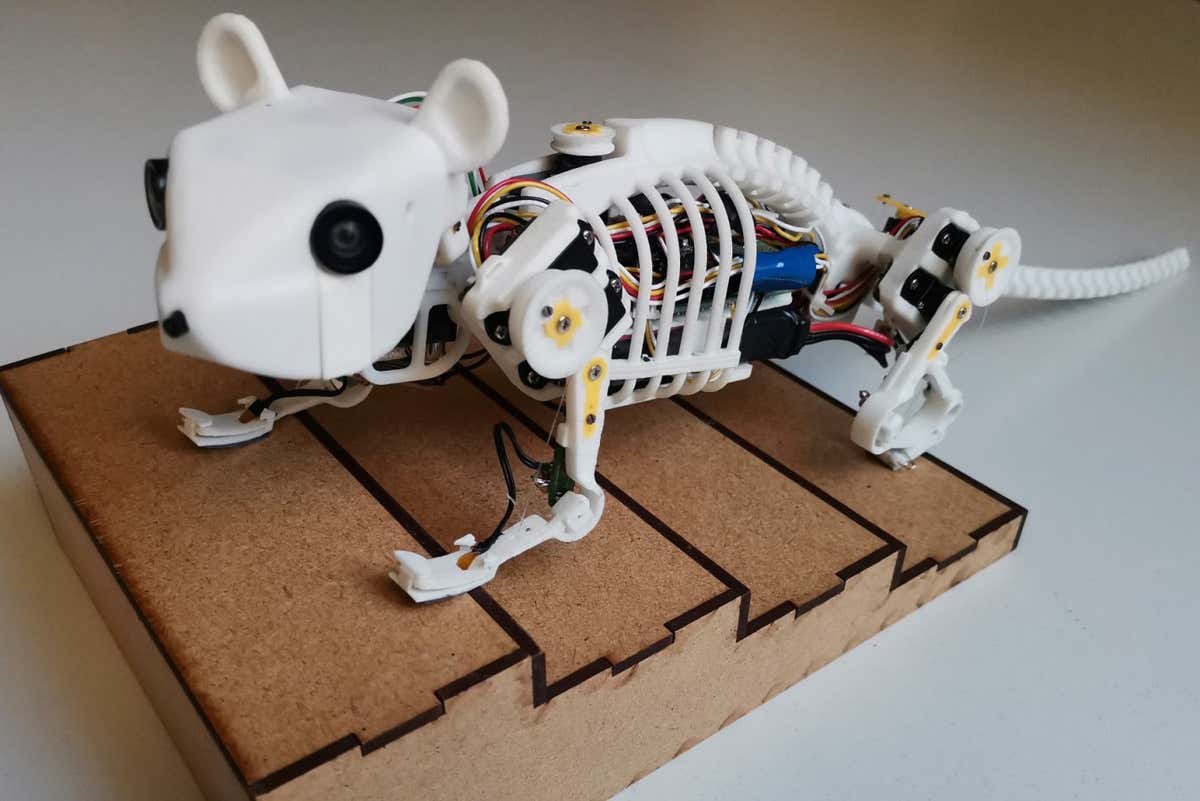
Robotic Mouse with Flexible Spine Moves with Greater Speed and Agility
Researchers have developed a 3D-printed mouse-like robot...