
The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable and hard-to-reach locations, researchers Suyi Li and Ian Walker are pioneering a novel approach—using the principles of origami and insights from the plant kingdom to develop adaptable and resilient robotic systems. Their four-year, $840,000 grant from the National Science Foundation aims to revolutionize environmental monitoring by creating robots capable of thriving in unpredictable and challenging conditions over extended periods.

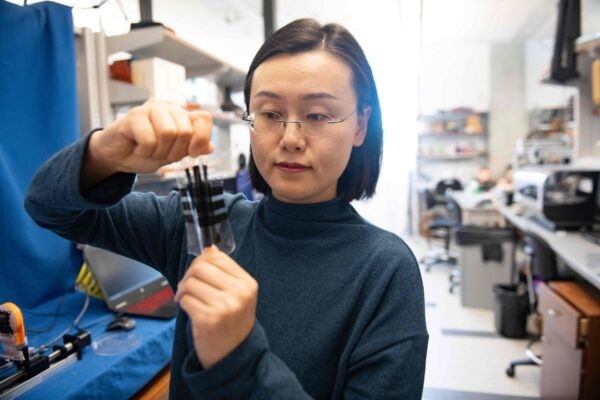
Figure 1. Plant-Inspired Robot. (Credit: Alex Parrish/ Virginia Tech)
Figure 1 shows (From left) Graduate researcher Vishrut Deshpande and Associate Professor Suyi Li inspect a plant-inspired robot prototype.
Origami-inspired Robotics for the Wild
Traditional robotics often struggle when faced with the unpredictability of nature and the constraints of long-term deployments. Li's expertise in applying origami principles to soft robotics, combined with Walker's two-decade experience in biologically inspired robotics, forms the foundation of their groundbreaking work.
The team is not creating literal robot plants; instead, they are translating durable natural mechanisms into mechanics that adapt and respond to environmental changes. Inspired by plant behaviors such as sunflower-like solar tracking, venus flytrap-like opening and closing, and adaptive attachment like vines winding around trees, Li and Walker aim to mimic these actions in their robotic designs.
Accordion-like Trunks and Bio-inspired Electronics
Li's group will leverage origami engineering to craft accordion-like robotic trunks that can unfold and self-lock. Paired with Walker's expertise in bio-inspired electronics, these trunks will form durable containers capable of responding dynamically to the challenges of outdoor environments.
To sense environmental changes, the team will draw inspiration from tree leaves and needles. Extensions equipped with devices for real-time monitoring will feed information into the trunk's electronics, guiding the robot's adaptive actions. This could include light sensors mimicking sunflowers and bio-inspired needles that interact with the environment, pushing aside obstacles for effective monitoring.
Powering the Future: Mimicking Plant Energy Harvesting
Powering robots in remote and challenging environments is a critical hurdle. Li and Walker's team is exploring energy harvesting methods inspired by real plants to keep the robots running without the need for frequent battery changes. By adopting novel harvesting approaches with low energy consumption, the researchers aim to ensure continuous operation over extended periods.
Tailored Solutions for Varied Monitoring Needs
Recognizing that different monitoring tasks require different operational durations, the team plans to tailor each plant-inspired robot's approach accordingly. Whether measuring long-term pollution levels or capturing rare animal sightings, the robots will be designed to adapt to the specific challenges of their missions.
A Vision for the Future: Adaptable Robots for Environmental Protection
Ultimately, Li and Walker aspire to develop a new breed of robots capable of safeguarding our environment over months and years. These robots would monitor both slow-changing processes, such as temperature and humidity, and rapidly occurring events like wildfires. By allowing robots to grow and adapt with their surroundings, especially in dynamic environments like coral reefs and forests, this innovative approach could revolutionize how we study and monitor remote regions, ushering in a new era of sustainable environmental exploration.
Source: Virginia Tech
Cite this article:
Hana M (2023), The Future of Environmental Monitoring with Plant-Inspired Robotics, AnaTechMaz, pp. 16
Recent Post
-
The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable.,..
-
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea Advanced Institute of Science ....
-
IIT Bombay Study Proposes Innovations for Enhanced Robot Cooperation
Novel algorithms have been developed to enhance cooperation among...
-

Northwestern University Introduces MaxDiff RL Algorithm
Engineers at Northwestern University have unveiled a groundbreaking...
-

Milestone Achievement: UZ Brussel Conducts Groundbreaking Dual Robotic Surgery for Patient with Post-Breast Surgery Lymphoedema
In a groundbreaking surgery conducted on Wednesday...
-
Revolutionizing Robotics with Stretchy Electronic Skin
Researchers at The University of Texas at Austin have...
-
Harnessing Microrobots to Combat Plastic Pollution and Bacterial Contamination in Water
In our modern world, the proliferation of plastic waste poses a...
-

Autonomous Flight Within a Collective Swarm
Festo's Bionic Learning Network has consistently dazzled us with their...
-

The 4K Drone Is Equipped with Dual Cameras and Advanced Obstacle Avoidance Technology
In short, this $70 4K Dual-Camera Drone, equipped with user-...
-

Introducing The DAL-E Delivery Robot: Hyundai Motor and Kia's Innovation in Indoor Autonomous Delivery Services
SEOUL, April 3, 2024 – Hyundai Motor Company (Hyundai Motor)...
-

A Robot Capable of Engaging in Video Games Alongside Humans
Over the past few years, engineers have created a diverse array...
-

Watch Robo Erectus: Evolution of W1 Quadruped Robot into Upright Walker
While having four legs with wheels might seem quite functional ...
-
Easier Management for Shape-Shifting Robots
Imagine formless 'slime' robots dynamically altering their shape to...
-

Watch $16k G1 Humanoid Robot Masterfully Crack Nuts, Twist, And Twirl with Precision
The progress in humanoid development at Unitree, a Chinese ...
-
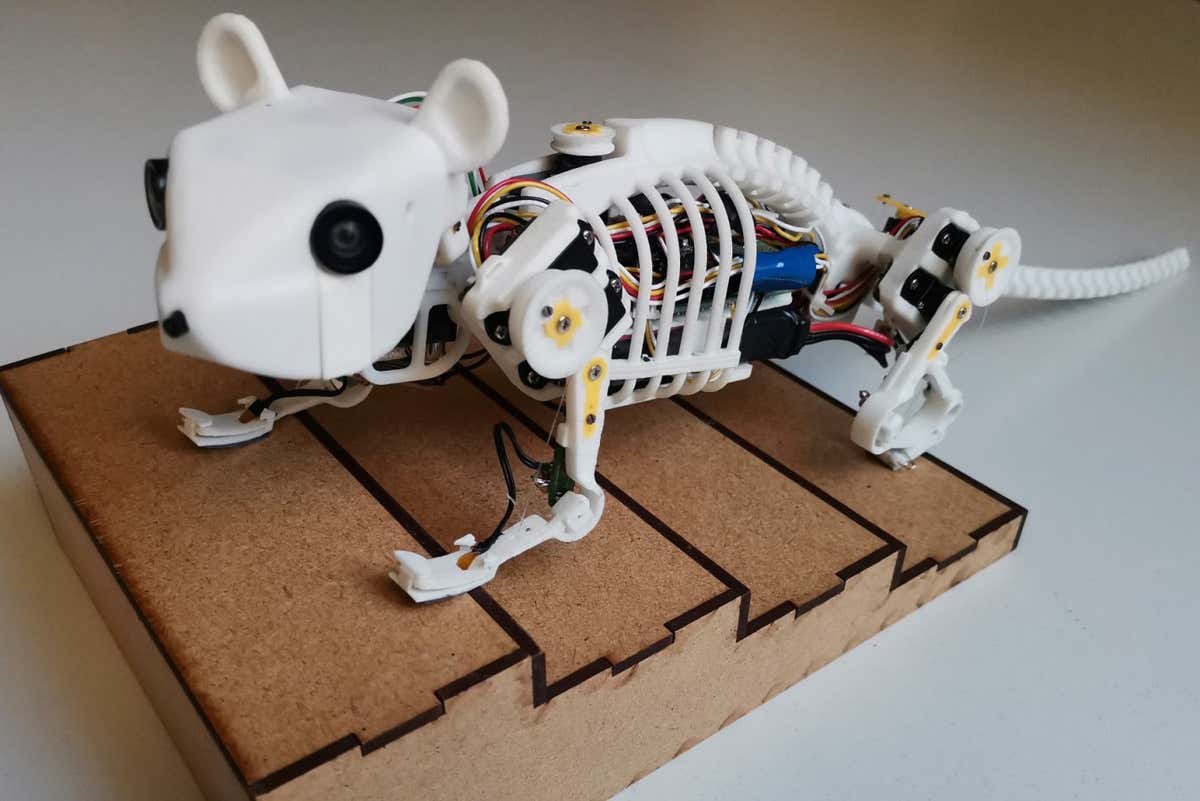
Robotic Mouse with Flexible Spine Moves with Greater Speed and Agility
Researchers have developed a 3D-printed mouse-like robot...