
Versatile Quadruped Robot Climbs Ladders Faster Than Ever
The ANYmal quadruped robot not only walks on four legs but can also roll on four wheels, stand upright, throw boxes, and navigate stairs. Now, it has added ladder climbing to its impressive repertoire.
Developed by engineers at the ETH Zurich research institute, the ANYmal quadruped robot first gained attention in 2017 for its ability to use elevators in high-rise buildings. [1] Since then, it has become commercially available through ETH spinoff ANYbotics, with a wheeled version now marketed as the Swiss-Mile robot by another startup.
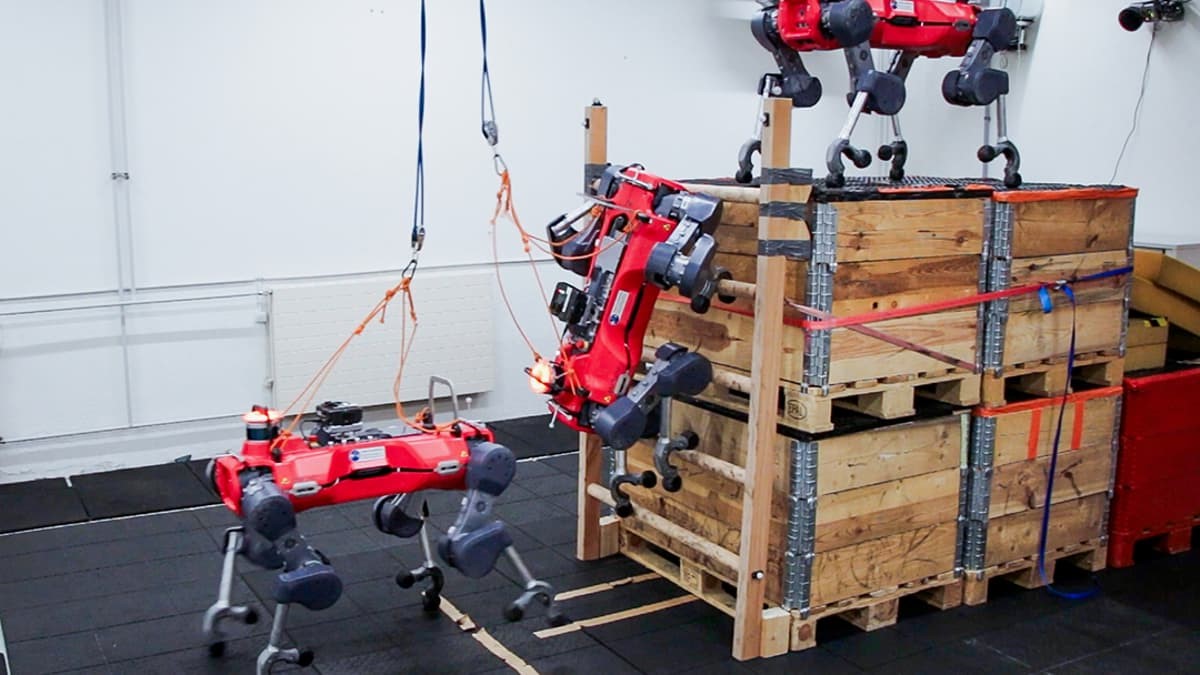
Figure 1. A multiple exposure showing the modified ANYmal robot climbing a ladder
The current model of the ANYmal robot walks at a speed of 0.75 m (2.46 ft) per second and can travel across indoor or outdoor terrain for 90 to 120 minutes on a single battery charge. It is equipped with sensors including a 360-degree lidar module, six depth-sensing cameras, and two optical cameras, all of which provide data to two Intel 6-core processors. Figure 1 shows A multiple exposure showing the modified ANYmal robot climbing a ladder.
This advanced technology enables the ANYmal robot to autonomously carry out tasks like safety and security inspections in environments such as factories, gas plants, warehouses, and even mines. However, parts of these locations are only accessible via ladders, a task that the standard ANYmal robot was previously unable to perform.
To overcome the limitation of ladder climbing, a team of ETH Zurich roboticists, led by Dylan Vogel and Robert Baines, modified the ANYmal robot by replacing its feet with four "hooked end effectors." These C-shaped appendages enable the robot to apply both compressive and tensile forces to the ladder rungs. By pushing down on lower rungs while pulling itself up on higher ones, the robot can stabilize its center of mass and successfully climb the ladder.
The hooked end effectors wouldn't be effective without proper guidance, so the team employed a "privileged teacher-student reinforcement learning approach." Simply put, this method involves training a virtual "teacher" using a computer model where all variables—like ladder angle and rung spacing—are known. Meanwhile, a virtual "student" is trained to mimic the teacher’s actions, but only using noisy, real-world sensory data. This enables the robot to learn how to use the effectors correctly in a variety of conditions.
The virtual student, equipped with knowledge from the teacher and sensory data, is then integrated into the software used by the physical robot to climb ladders. [2] In lab tests, the modified ANYmal achieved a remarkable 90% success rate at ascending ladders with angles ranging from 70 to 90 degrees. Furthermore, it climbed these ladders 232 times faster than any other ladder-climbing robot, whether bipedal or quadrupedal.
References:
- https://www.electronicsforu.com/news/can-a-quadruped-robot-climb-ladders
- https://newatlas.com/robotics/anymal-quadruped-robot-climbs-ladders/
Cite this article:
Janani R (2024), Versatile Quadruped Robot Climbs Ladders Faster Than Ever, AnaTechMaz, pp. 98
Recent Post
-

Drone-Mounted Probe Collects DNA From Treetops, Sparing Us the Effort
Collecting genetic material from treetops in tropical rainforests is a.,..
-
Magnetic Mini-Robots Navigate 3D Networks to Target Multiple Disease Sites Simultaneously
Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS) in....
-
Robots Learn to Clean by Watching Humans: TU Wien’s Award-Winning Innovation
Robots are designed to handle boring or unpleasant tasks, yet...
-

The "World's First Multi-Modal Biped Robot" Could Be Yours Soon
Ever dreamed of owning your own AT-ST walker from Star Wars...
-

A Crop-Spraying Robot Is Engineered to Lower Emissions and Minimize Herbicide Use
Spraying orchards and vineyards is far from eco-friendly, as...
-

Pangolin-Inspired Robot Deposits Tree Seeds into Holes It Digs
Since foraging pangolins already dig in the dirt, why not have them...
-

Ambitious Robot Learns to Clean a Bathroom Sink by Observing
From washing urinals to tidying beaches, we can already envision a...
-
Versatile Quadruped Robot Climbs Ladders Faster Than Ever
The ANYmal quadruped robot not only walks on four legs but can...
-

Robot Masters Surgical Tasks Simply by Watching Videos
While humans require years of rigorous study and precision to perform...
-
Instructing A Robot on Its Boundaries to Perform Open-Ended Tasks Safely
The "PRoC3S" method assists a large language model (LLM) in...
-

Biomimetic Robotic Bird-Plane Takes Flight with A Leap
Although autonomous flying robots hold promising potential...
-

Chinese Police Test Amphibious Crime-Fighting Robot Sphere
Weighing 125 kg (276 lbs), this robotic ball resembles something.....
-

Pudu Introduces a Life-Size Humanoid Robot Designed to Perform Warehouse Tasks
Chinese startup Pudu Robotics introduces its latest creation, the humanoid robot D9, standing at 5.57...
-
New DNA Origami Method Could Build Cancer-Fighting Nanorobots
Researchers have developed programmable, 3D nanoscale...
-
See the Fastest Swimming Soft Robot Glide Like a Manta Ray
Researchers in the US have drawn inspiration from the graceful, bird-..