
Magnetic Mini-Robots Navigate 3D Networks to Target Multiple Disease Sites Simultaneously
Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS) in Stuttgart, Germany, have unveiled a groundbreaking approach for deploying multiple magnetic miniature robots, capable of navigating complex 3D networks resembling human blood vessels. This innovative method, which could revolutionize treatment for multiple hard-to-reach disease sites, may soon enable doctors to address several problem areas at once, significantly reducing procedure time and enhancing the effectiveness of minimally invasive therapies.
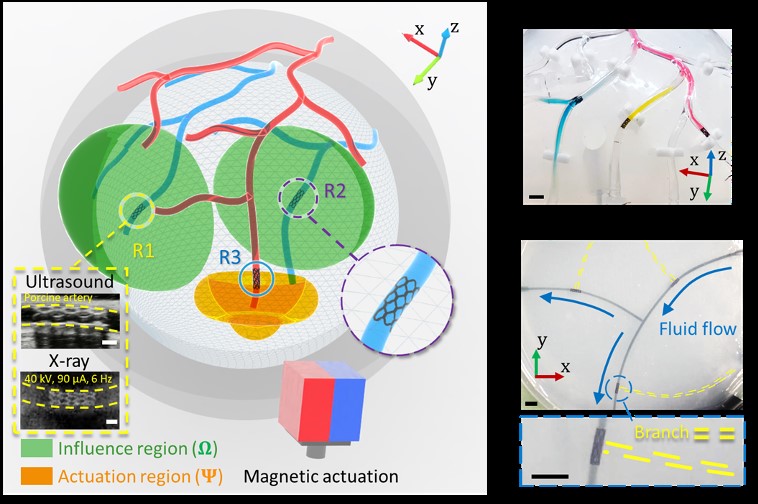
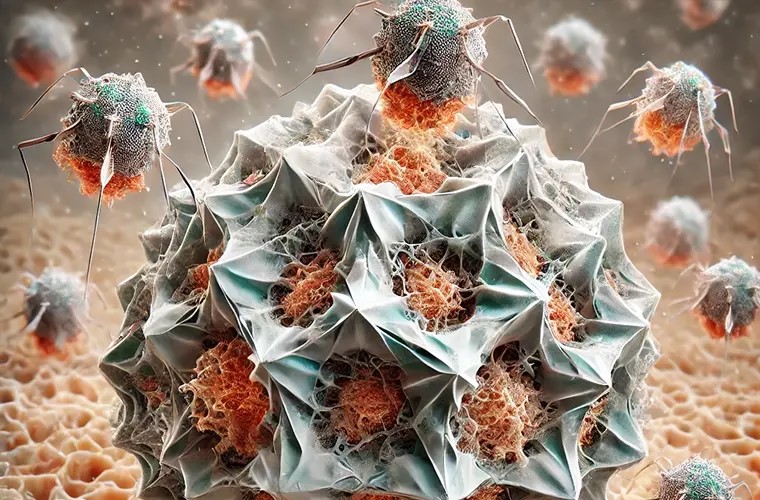
Figure 1. The Proposed Method. (Credit: MPI-IS)
In clinical settings, multi-site conditions are common, particularly in cases like brain blockages. Blocked blood vessels can cause strokes, rapidly depriving brain cells of oxygen. When multiple vessels are obstructed, entire brain regions may be left without blood flow, leading to severe neurological damage or even death if untreated. The need for advanced, multi-target treatment options is pressing, and magnetically actuated soft robots offer a promising solution by allowing simultaneous, targeted interventions in challenging-to-reach areas. Figure 1 shows the magnetic robot is the shape of a stent, designed to flexibly adapt to changes in the lumen.
Researchers at MPI-IS designed a system where tiny, five-millimeter robots can navigate and perform tasks within a 3D matrix closely resembling blood vessel networks. Their findings, recently published in Science Advances, showcase how these robots can independently move to different locations in a simulated vascular network to deliver drugs or modify fluid flow [1]. Unlike previous methods, this new approach allows each robot to be individually controlled, providing unprecedented flexibility.
The miniature robots are shaped like stents, designed to adapt to the natural twists and turns of vessels. However, navigating through these complex paths requires a powerful magnetic force to counteract fluid resistance. To manage this, the team devised a method to selectively control each robot: by strategically positioning an external magnet, they can “turn on” the desired robot while keeping others stationary. "To our knowledge, this is the first case of independent control of more than five robots in 3D lumens under physiologically relevant conditions," explains Chunxiang Wang, first author of the paper [2].
The robots’ motion is directed by a rotating permanent magnet, creating both activation and neutral zones. Moving the magnet within the activation zone enables the target robot to function, while keeping it outside disables other robots, offering intuitive control. Operators can input specific target points, and the system’s robotic arm, guided by a path-planning algorithm, automatically deploys the robots, making the technology remarkably user-friendly.
“For us it was quite a challenge to control multiple magnetic robots all at once – after all, all magnetic parts are affected by the magnetic field in the same way,” adds Tianlu Wang, a former postdoctoral researcher at MPI-IS. “Our work provides a solution for multi-robot actuation, enhancing applications across various miniature soft robotic device designs in complex environments.”
According to Metin Sitti, former Director of the Physical Intelligence Department at MPI-IS, this system has broad potential in biomedical applications, as it enables “a group of soft robots equipped with diverse functional modules to reach hard-to-access areas deep inside the human body for targeted therapy.”
This new generation of controllable miniature robots could pave the way for highly efficient, minimally invasive treatments, offering new hope for complex, multi-site conditions and transforming future healthcare.
Source: Max Planck Institute for Intelligent Systems
References:
- https://www.eurekalert.org/news-releases/1064056
- https://medicalxpress.com/news/2024-11-3d-robot-enable-multi-site.html?deviceType=desktop
Cite this article:
Hana M (2024), Magnetic Mini-Robots Navigate 3D Networks to Target Multiple Disease Sites Simultaneously, AnaTechMaz, pp. 92
Recent Post
-

Drone-Mounted Probe Collects DNA From Treetops, Sparing Us the Effort
Collecting genetic material from treetops in tropical rainforests is a.,..
-
Magnetic Mini-Robots Navigate 3D Networks to Target Multiple Disease Sites Simultaneously
Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS) in....
-
Robots Learn to Clean by Watching Humans: TU Wien’s Award-Winning Innovation
Robots are designed to handle boring or unpleasant tasks, yet...
-

The "World's First Multi-Modal Biped Robot" Could Be Yours Soon
Ever dreamed of owning your own AT-ST walker from Star Wars...
-

A Crop-Spraying Robot Is Engineered to Lower Emissions and Minimize Herbicide Use
Spraying orchards and vineyards is far from eco-friendly, as...
-

Pangolin-Inspired Robot Deposits Tree Seeds into Holes It Digs
Since foraging pangolins already dig in the dirt, why not have them...
-

Ambitious Robot Learns to Clean a Bathroom Sink by Observing
From washing urinals to tidying beaches, we can already envision a...
-
Versatile Quadruped Robot Climbs Ladders Faster Than Ever
The ANYmal quadruped robot not only walks on four legs but can...
-

Robot Masters Surgical Tasks Simply by Watching Videos
While humans require years of rigorous study and precision to perform...
-
Instructing A Robot on Its Boundaries to Perform Open-Ended Tasks Safely
The "PRoC3S" method assists a large language model (LLM) in...
-

Biomimetic Robotic Bird-Plane Takes Flight with A Leap
Although autonomous flying robots hold promising potential...
-

Chinese Police Test Amphibious Crime-Fighting Robot Sphere
Weighing 125 kg (276 lbs), this robotic ball resembles something.....
-

Pudu Introduces a Life-Size Humanoid Robot Designed to Perform Warehouse Tasks
Chinese startup Pudu Robotics introduces its latest creation, the humanoid robot D9, standing at 5.57...
-
New DNA Origami Method Could Build Cancer-Fighting Nanorobots
Researchers have developed programmable, 3D nanoscale...
-
See the Fastest Swimming Soft Robot Glide Like a Manta Ray
Researchers in the US have drawn inspiration from the graceful, bird-..