
Robots Learn to Clean by Watching Humans: TU Wien’s Award-Winning Innovation
Robots are designed to handle boring or unpleasant tasks, yet automating some chores, like cleaning a bathroom, is still highly complex. Calculating the precise movements for a robot arm to reach every part of a washbasin, especially one with curved edges, is a daunting challenge. Specifying the exact amount of force to apply at every point is equally difficult. Instead of programming countless precise instructions, researchers at TU Wien have taken a unique approach: letting robots learn from humans.
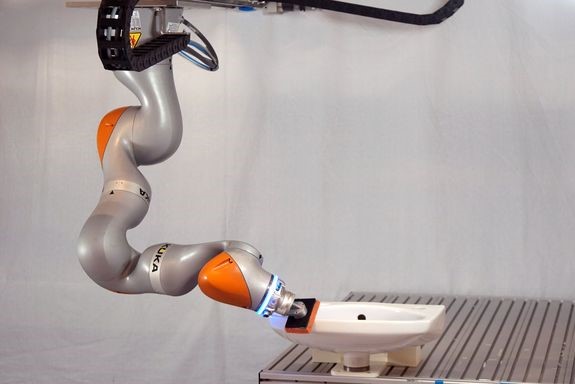
Figure 1. Robot cleaning a washbasin. (Credit: TU Wien)
At TU Wien, a human demonstrates the cleaning process by repeatedly scrubbing the edge of a sink with a specially equipped sponge, showing the robot how it’s done. This human-robot training method, recently showcased at the prestigious IROS 2024 conference in Abu Dhabi [1], enables the robot to observe and learn each movement. Equipped with a sensor-laden sponge, the robot gathers valuable data from these demonstrations, allowing it to generalize its knowledge and clean a variety of sink shapes with ease. Figure 1 demonstrates the robot cleaning a washbasin.
Beyond Cleaning: A New Way to Train Robots for Surface Treatments
“Cleaning is just one type of surface treatment,” explains Prof Andreas Kugi from TU Wien’s Automation and Control Institute. Other tasks, like sanding, polishing, painting, or applying adhesives, share similar technical requirements. “Capturing the geometric shape of a washbasin with cameras is relatively simple,” Kugi adds. “But that’s not the crucial step.” The real challenge lies in teaching the robot how to adapt its motion, speed, angle, and force to suit each surface’s shape [2].
Traditionally, people learn these skills through observation and feedback. “In a workshop, someone might look over the apprentice’s shoulder and say: You need to press a little harder on that narrow edge,” says Christian Hartl-Nesic, who leads the Industrial Robotics group at TU Wien. TU Wien’s approach lets robots learn similarly—through experience and imitation.
Data-Driven Learning with a ‘Demo’ Sponge
The team developed a unique cleaning tool: a sponge fitted with force sensors and tracking markers. Human demonstrations of cleaning just the sink’s front edge provided enough data to train a robot. The process relies on a sophisticated data processing method developed by TU Wien’s team, which integrates several machine-learning techniques. By statistically analyzing the data, they train a neural network to recognize basic motion elements, called “motion primitives,” which control the robot arm as it cleans the surface [3].
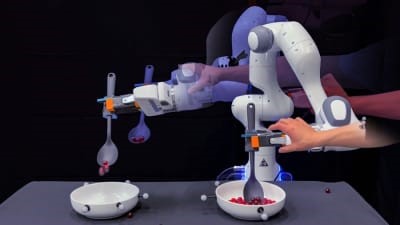
This algorithm empowers the robot to adapt to various sink shapes after observing only one edge-cleaning demonstration. “The robot learns that you have to hold the sponge differently depending on the shape of the surface, that you have to apply a different amount of force on a tightly curved area than on a flat surface,” explains Christoph Unger, a PhD student in TU Wien’s Industrial Robotics group.
Envisioning the Future: Workshop Robots That Learn and Share Knowledge
The potential for this technology spans beyond cleaning. TU Wien envisions applications in tasks like sanding wood, polishing car surfaces, and welding sheet metal. In the future, a mobile robot could be deployed across workshops as a versatile helper. With ‘federated learning,’ robots in different locations could share what they’ve learned, improving each other’s capabilities while keeping private data confidential.
The sink-cleaning robot’s flexibility has been thoroughly tested at TU Wien, garnering global attention and earning the “Best Application Paper Award” at IROS 2024, one of the year’s top robotics innovations.
Source: Vienna University of Technology
References:
- https://techxplore.com/news/2024-11-washbasin-robot-imitate-human-motions.html
- https://newatlas.com/robotics/robot-cleans-sink/
- https://www.deccanherald.com/technology/scientists-develop-self-learning-robot-which-imitates-humans-to-perform-household-chores-3270228
Cite this article:
Hana M (2024), Robots Learn to Clean by Watching Humans: TU Wien’s Award-Winning Innovation, AnaTechMaz, pp. 93
Recent Post
-

Drone-Mounted Probe Collects DNA From Treetops, Sparing Us the Effort
Collecting genetic material from treetops in tropical rainforests is a.,..
-
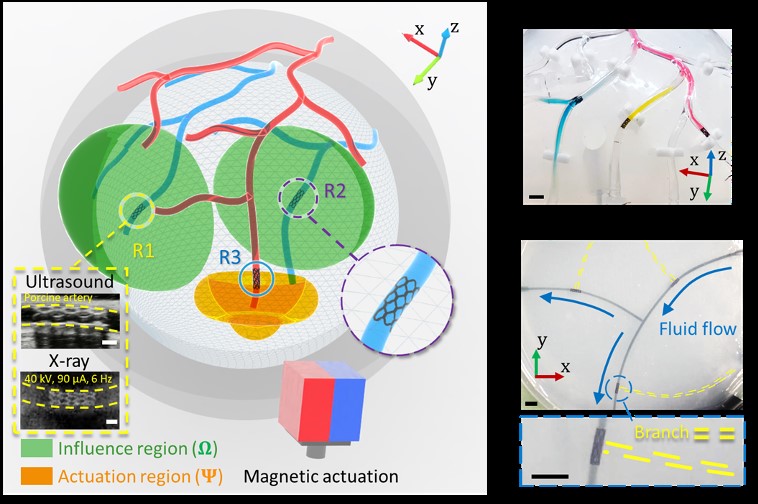
Magnetic Mini-Robots Navigate 3D Networks to Target Multiple Disease Sites Simultaneously
Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS) in....
-
Robots Learn to Clean by Watching Humans: TU Wien’s Award-Winning Innovation
Robots are designed to handle boring or unpleasant tasks, yet...
-

The "World's First Multi-Modal Biped Robot" Could Be Yours Soon
Ever dreamed of owning your own AT-ST walker from Star Wars...
-

A Crop-Spraying Robot Is Engineered to Lower Emissions and Minimize Herbicide Use
Spraying orchards and vineyards is far from eco-friendly, as...
-

Pangolin-Inspired Robot Deposits Tree Seeds into Holes It Digs
Since foraging pangolins already dig in the dirt, why not have them...
-

Ambitious Robot Learns to Clean a Bathroom Sink by Observing
From washing urinals to tidying beaches, we can already envision a...
-
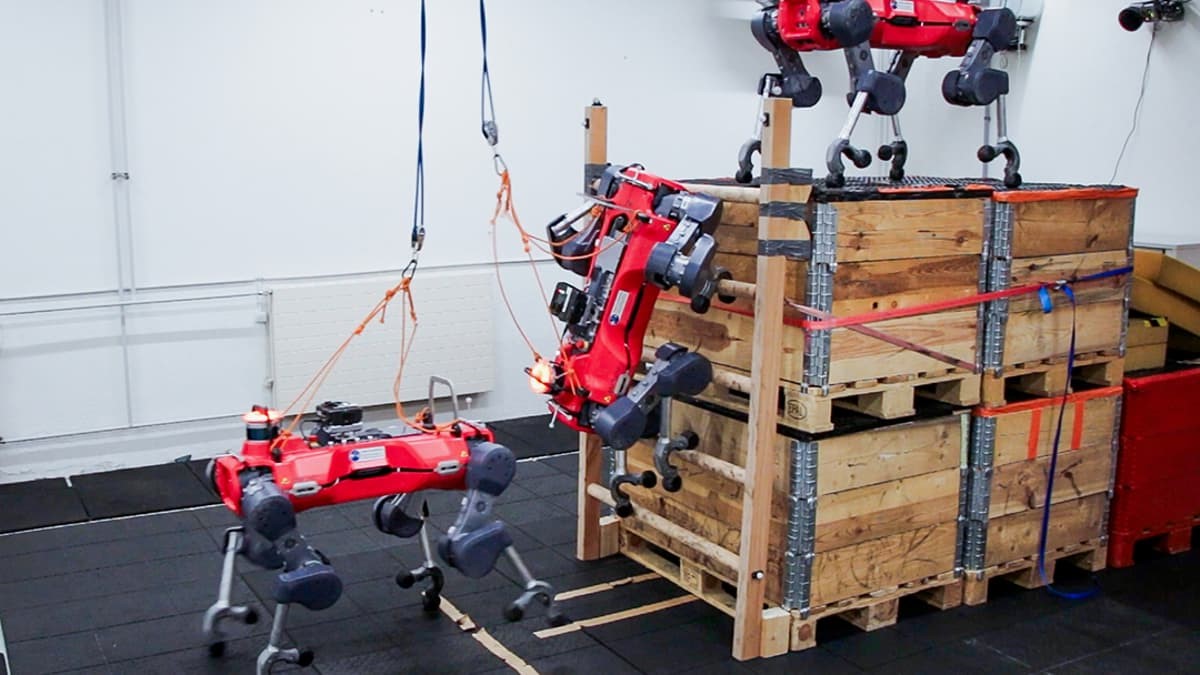
Versatile Quadruped Robot Climbs Ladders Faster Than Ever
The ANYmal quadruped robot not only walks on four legs but can...
-

Robot Masters Surgical Tasks Simply by Watching Videos
While humans require years of rigorous study and precision to perform...
-
Instructing A Robot on Its Boundaries to Perform Open-Ended Tasks Safely
The "PRoC3S" method assists a large language model (LLM) in...
-

Biomimetic Robotic Bird-Plane Takes Flight with A Leap
Although autonomous flying robots hold promising potential...
-

Chinese Police Test Amphibious Crime-Fighting Robot Sphere
Weighing 125 kg (276 lbs), this robotic ball resembles something.....
-

Pudu Introduces a Life-Size Humanoid Robot Designed to Perform Warehouse Tasks
Chinese startup Pudu Robotics introduces its latest creation, the humanoid robot D9, standing at 5.57...
-
New DNA Origami Method Could Build Cancer-Fighting Nanorobots
Researchers have developed programmable, 3D nanoscale...
-
See the Fastest Swimming Soft Robot Glide Like a Manta Ray
Researchers in the US have drawn inspiration from the graceful, bird-..