
An Octopus-Inspired Robot Can Autonomously Determine How to Grip Objects with High Accuracy
Scientists have developed a soft robot that can autonomously decide how to move and grip objects by sensing its surroundings—much like an octopus. Inspired by the octopus’s unique nervous system, the robot uses suction not only to adhere to surfaces but also to gather environmental information and control its movements without relying on a central computer.
Created by researchers at the University of Bristol’s Faculty of Science and Engineering, the robot leverages suction flow for both attachment and environmental sensing. It mimics the octopus’s ability to use its sensor-rich suckers and distributed nervous system to manipulate objects with impressive dexterity.
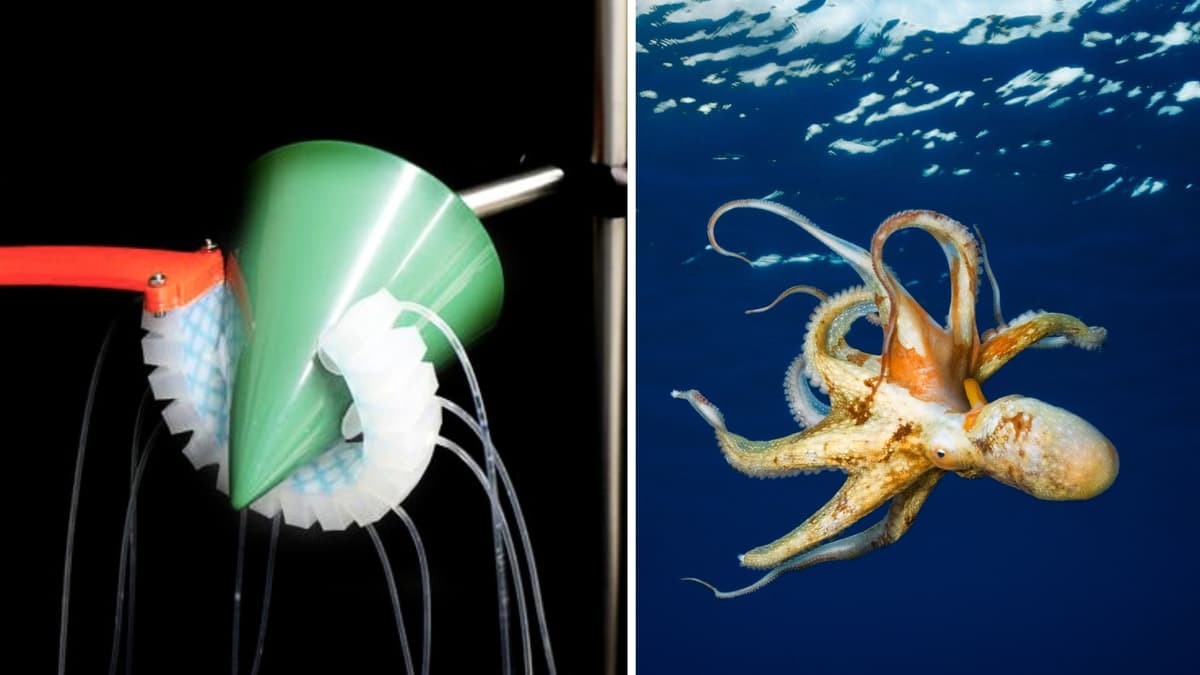
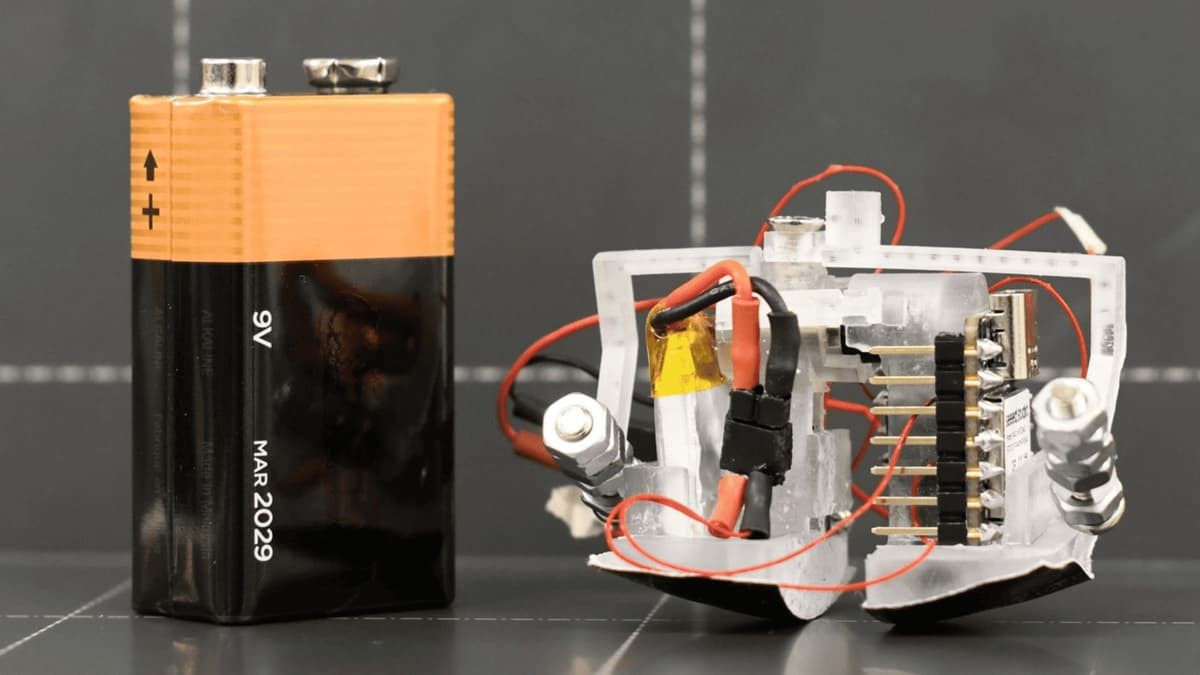
Figure 1. Suction Cups Using Suction Intelligence to Grasp Object.
According to the study published in Science Robotics, the team drew inspiration from the octopus’s efficient neuromuscular hierarchy, which integrates local sensing and decision-making in its limbs with higher-level central control. By combining soft suction cups, flexible computational elements, and soft actuators, the researchers were able to replicate key aspects of this biological intelligence in their robotic design.
Lead author Tianqi Yue explained, “Last year, we developed an artificial suction cup that mimicked how octopuses use soft materials and water sealing to cling to surfaces [1]. This new research takes that concept further by creating ‘embodied suction intelligence’—incorporating features of the octopus’s neuromuscular system into soft robotic systems.”
The study highlights two levels at which this suction intelligence operates. On one level, the integration of suction flow and local fluidic circuits enables low-level embodied intelligence, allowing the robot to gently grasp delicate objects, adaptively curl, and envelop items of unknown shapes. On a higher level, the robot can decode pressure signals from the suction cups to detect contact, distinguish between air, water, and rough surfaces, and even estimate the pulling force applied—enabling multimodal perception.
This low-cost and simple approach to suction intelligence could pave the way for a new generation of soft robots that are more energy-efficient, intelligent, and safe to use. Potential applications include gently harvesting fruit in agriculture, handling delicate items in manufacturing, anchoring medical instruments within the human body, and creating interactive soft toys or wearable devices.
Reference
- https://interestingengineering.com/innovation/octopus-inspired-robot-grip-objects
Cite this article:
Keerthana S (2025), An Octopus-Inspired Robot Can Autonomously Determine How to Grip Objects with High Accuracy, AnaTechMaz, pp.192
Recent Post
-
How Robots Uncovered A 280,000-Year-Old Seafloor Secret Beneath Big Sur
Extensive research led by the Monterey Bay Aquarium Research Institute....
-

DJI Aims to Expand Creative Possibilities with the Triple-Camera Mavic 4 Pro
The Mavic 4 Pro’s triple-camera system provides “aerial storytellers....
-

Rivr’s Dog-Like Robots Team Up with Veho Vans to Tackle The ‘Last 100 Yards’ of Parcel Delivery in Austin
Most delivery automation stops at the curb, but for Veho and Zurich-based....
-

Robot 3D-Printed in One Piece Upside-Down, Then Walks out of the Printer
Although soft-bodied robots have many potential applications, they are usually....
-

Flying Robot Transforms Mid-Air to Land and Roll-on Wheels
Imagine a robot capable of transforming between a flying drone ....
-
Elon Musk Unveils Dancing Tesla Optimus Robot in New Video
Elon Musk recently posted a video on his X account showcasing the Tesla....
-

Japan's SPIDAR Robot Crawls and Flies with Precision Thrust Control
Researchers at the University of Tokyo have developed a groundbreaking....
-
Singapore Embraces Robot Dogs for a Smarter, Safer Future
Robot dogs are taking on an expanding range of roles in Singapore....
-
Palm-Sized Bipedal Robot Zippy Runs, Climbs, And Takes on Rescue Missions
Bipedal robots aren’t just human-sized machines with arms and ....
-

Mini Brain-Inspired Tech Enables Humanoid Robots to See and Think in Real Time
Researchers at RMIT University in Australia have developed an advanced....
-

Centipede-Like Robots Offer a More Affordable Solution for Weed Control in Vineyards and Blueberry Farms
Inspired by the elongated, flexible movement of centipedes, Atlanta-based ....
-
An Octopus-Inspired Robot Can Autonomously Determine How to Grip Objects with High Accuracy
Scientists have developed a soft robot that can autonomously decide how to move....
-

Taiwan Deploys Nurabot, the World's First AI Nurse, to Address Healthcare Challenges
As the world faces a looming shortage of 4.5 million nurses by 2030....
-

U.S. Student Develops Sound-Driven Metamaterial to Enable Remote Control of Underwater Robots
Sound waves are more than just carriers of music and speech—they’re ....
-
Chinese Humanoid Robots Showcase Advanced Combat Abilities in Lead-Up to World’s First Robot Boxing Match
Humanoid robots in China recently demonstrated impressive combat....