
Robot 3D-Printed in One Piece Upside-Down, Then Walks out of the Printer
Although soft-bodied robots have many potential applications, they are usually produced only in small experimental batches. Scottish scientists aim to change this with a mass-producible soft robot that is 3D-printed in a single piece and then walks off the print bed.

Figure 1. Soft Robot 3D-Printed Upside-Down in One Piece, Then Walks Off the Printer.
Just this March, we shared news about a hexapod robot developed at UC San Diego that was 3D-printed in a single continuous 58-hour process. Instead of motors, that robot used compressed air to sequentially move its legs forward. Figure 1 shows Soft Robot 3D-Printed Upside-Down in One Piece, Then Walks Off the Printer.
Similarly, the new quadruped robot designed by scientists at The University of Edinburgh is also powered by air.
Unlike the UC San Diego robot, this one “only” takes nine hours to print. Additionally, while the San Diego bot was produced using a $1,000 printer, the Edinburgh robot is created with the Flex Printer—a ~$500 open-source platform built from off-the-shelf components.
Similar to its American predecessor, the Scottish robot is printed entirely from soft, flexible thermoplastic polyurethane (TPU). This material begins as a filament that is heated to its melting point and then extruded through a print nozzle, building the robot’s body layer by layer.
Because molten TPU is so soft, it’s notoriously challenging to work with. Rather than extruding in neat straight or curved lines, the material tends to buckle sideways—scientists compare the process to “trying to push on a piece of string.”
Another issue arises before the TPU cools and firms up (while remaining elastic): gravity causes the molten material to droop. This is especially problematic when printing horizontal, bridge-like structures, where drooping can prevent the TPU layers from properly connecting and fusing.
To solve the buckling problem, the team switched to a thicker, sturdier TPU filament—2.85 mm in diameter instead of the common 1.75 mm—which made the extrusion seven times more resistant to buckling.
The drooping issue was tackled by flipping the entire 3D-printing process upside-down. Instead of depositing TPU onto a print bed from above, the Flex Printer’s nozzle pushes the material upward onto a surface, where it sticks until deliberately released. This way, gravity actually aids in fusing the layers, as each new sticky layer presses against the one hanging below it.
The robot is then connected to a device called a pneumatic ring oscillator, which sends a pulsating air current at 2.25 bar (32.6 psi) through channels inside its body. This air pressure sequentially activates two ligament actuators in each leg, moving the limb side to side, along with a foot actuator that lifts the leg off the ground.
Although the robot created in the study is primarily a demonstrator, the researchers hope that this open-source technology will accelerate the development of soft-bodied robots for uses like exploration, medicine, and search and rescue.
“Using our new platform, anyone can now easily print things that were previously considered impossible,” says University of Edinburgh engineer Maks Gepner, who led the study alongside Prof. Adam A. Stokes. “With the long-standing manufacturing and design bottlenecks removed, we believe soft robotics is ready to make a major real-world impact.”
Source: NEW ATLAS
Cite this article:
Priyadharshini S (2025), Robot 3D-Printed in One Piece Upside-Down, Then Walks out of the Printer, AnaTechMaz, pp. 184
Recent Post
-
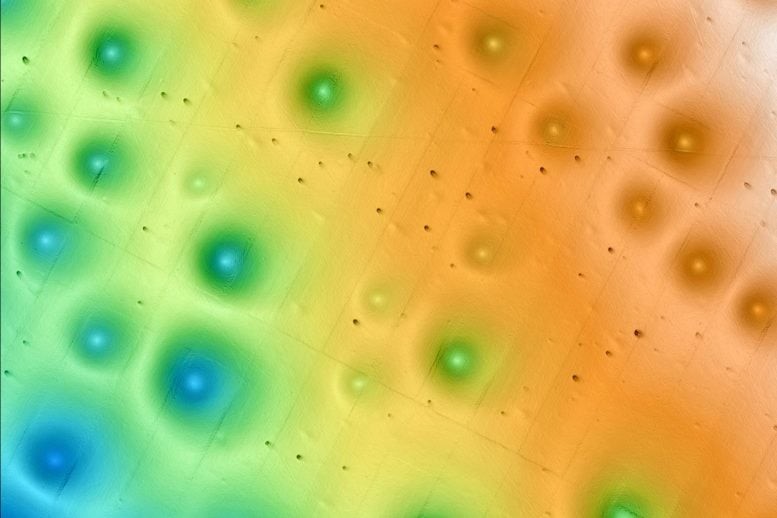
How Robots Uncovered A 280,000-Year-Old Seafloor Secret Beneath Big Sur
Extensive research led by the Monterey Bay Aquarium Research Institute....
-

DJI Aims to Expand Creative Possibilities with the Triple-Camera Mavic 4 Pro
The Mavic 4 Pro’s triple-camera system provides “aerial storytellers....
-

Rivr’s Dog-Like Robots Team Up with Veho Vans to Tackle The ‘Last 100 Yards’ of Parcel Delivery in Austin
Most delivery automation stops at the curb, but for Veho and Zurich-based....
-
Robot 3D-Printed in One Piece Upside-Down, Then Walks out of the Printer
Although soft-bodied robots have many potential applications, they are usually....
-

Flying Robot Transforms Mid-Air to Land and Roll-on Wheels
Imagine a robot capable of transforming between a flying drone ....
-
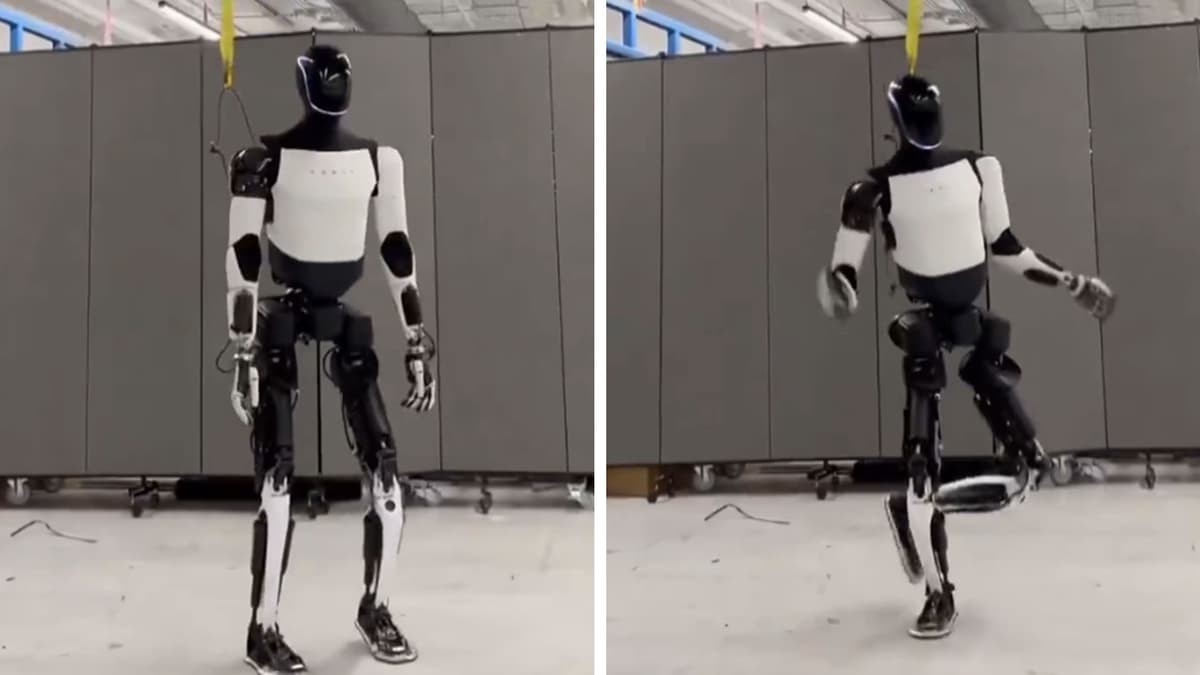
Elon Musk Unveils Dancing Tesla Optimus Robot in New Video
Elon Musk recently posted a video on his X account showcasing the Tesla....
-

Japan's SPIDAR Robot Crawls and Flies with Precision Thrust Control
Researchers at the University of Tokyo have developed a groundbreaking....
-
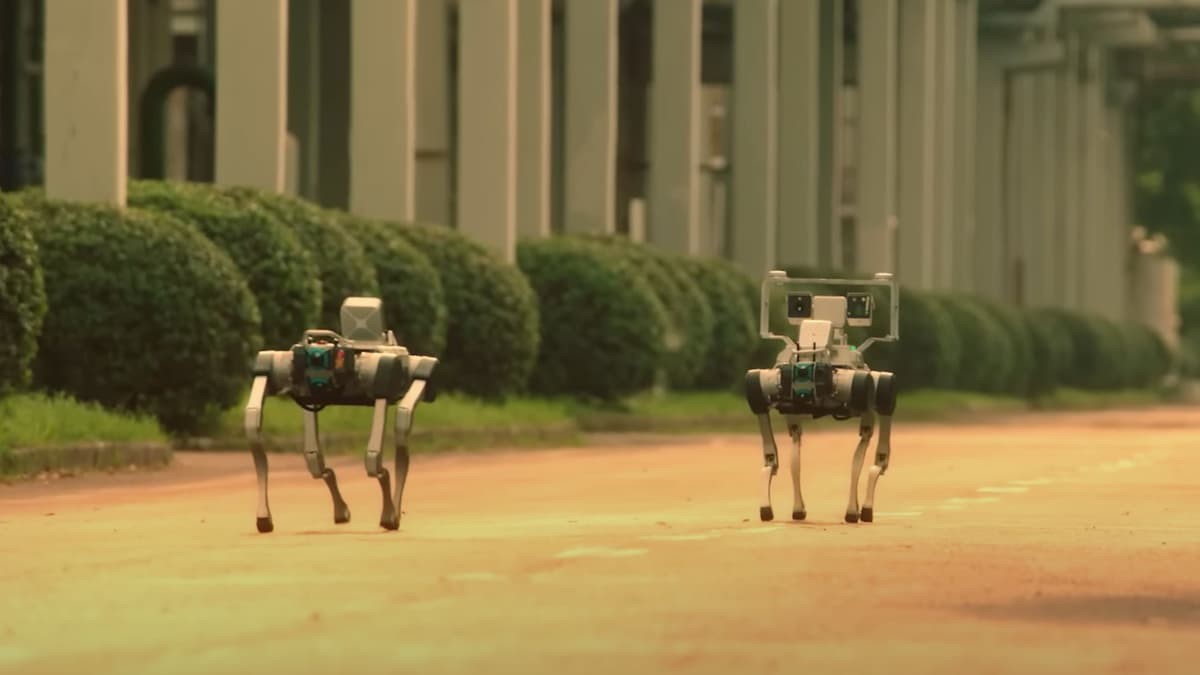
Singapore Embraces Robot Dogs for a Smarter, Safer Future
Robot dogs are taking on an expanding range of roles in Singapore....
-
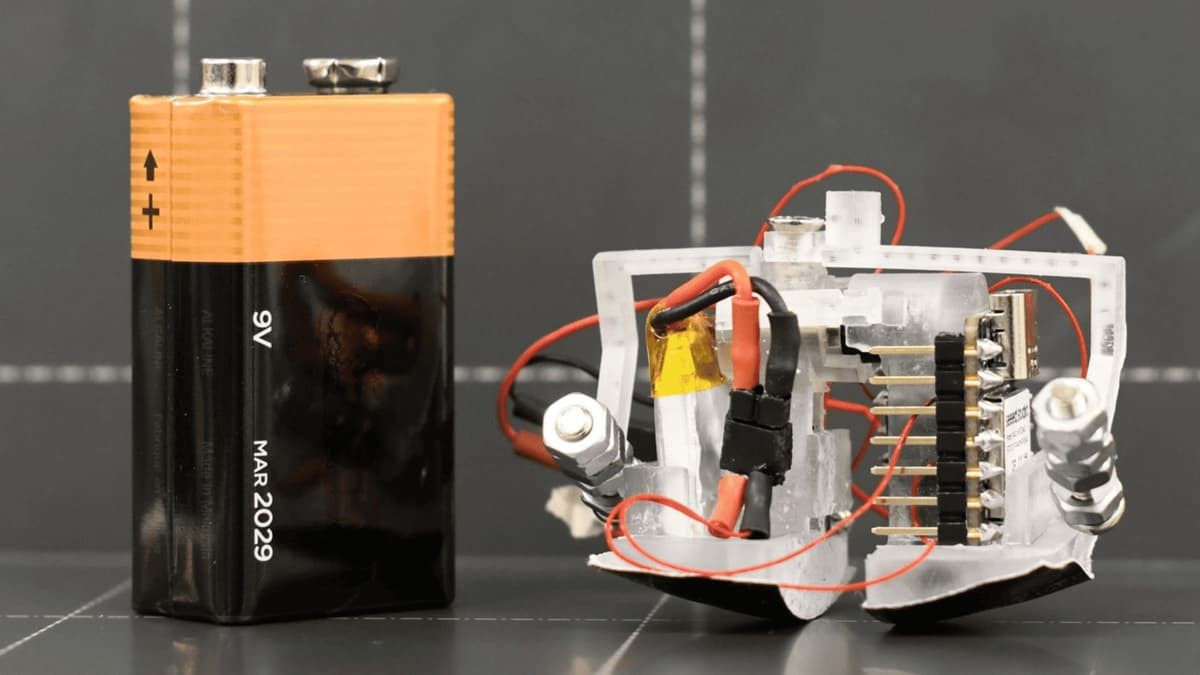
Palm-Sized Bipedal Robot Zippy Runs, Climbs, And Takes on Rescue Missions
Bipedal robots aren’t just human-sized machines with arms and ....
-

Mini Brain-Inspired Tech Enables Humanoid Robots to See and Think in Real Time
Researchers at RMIT University in Australia have developed an advanced....
-

Centipede-Like Robots Offer a More Affordable Solution for Weed Control in Vineyards and Blueberry Farms
Inspired by the elongated, flexible movement of centipedes, Atlanta-based ....
-
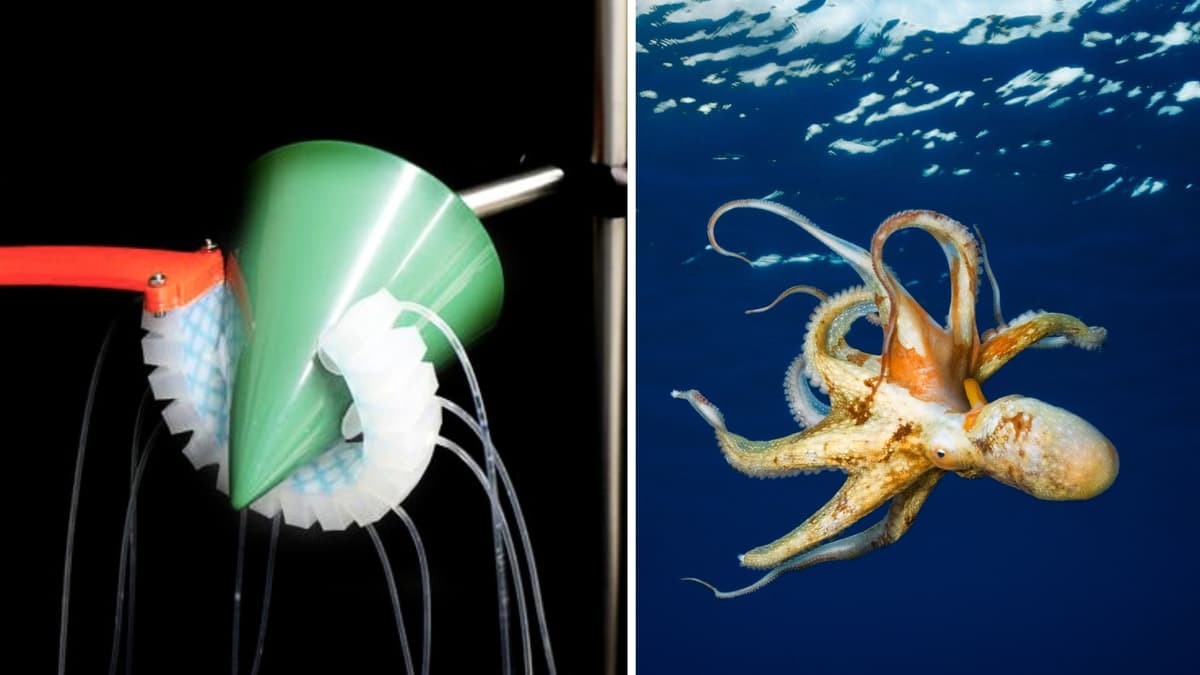
An Octopus-Inspired Robot Can Autonomously Determine How to Grip Objects with High Accuracy
Scientists have developed a soft robot that can autonomously decide how to move....
-

Taiwan Deploys Nurabot, the World's First AI Nurse, to Address Healthcare Challenges
As the world faces a looming shortage of 4.5 million nurses by 2030....
-

U.S. Student Develops Sound-Driven Metamaterial to Enable Remote Control of Underwater Robots
Sound waves are more than just carriers of music and speech—they’re ....
-
Chinese Humanoid Robots Showcase Advanced Combat Abilities in Lead-Up to World’s First Robot Boxing Match
Humanoid robots in China recently demonstrated impressive combat....