
Flying Robot Transforms Mid-Air to Land and Roll-on Wheels
Imagine a robot capable of transforming between a flying drone and a wheeled rover. Such versatility could be incredibly useful—provided it performs reliably in real-world conditions. The ATMO bot was built with that goal in mind, designed to execute its transformation mid-air.

Figure 1. Mid-Air Morphing Robot Lands and Rolls on Wheels.
That earlier robot operated like a standard quadcopter in flight, with its four shrouded propellers extended horizontally. Upon landing, the propellers folded downward to form right angles with the body, transforming into motorized wheels. The propeller shrouds then functioned as rubber-treaded rims, enabling ground mobility. Figure 1 shows Mid-Air Morphing Robot Lands and Rolls on Wheels
While it's a clever design, it shares a common flaw with similar robots: obstacles like rocks, grass, or other uneven terrain can block the propellers from folding fully into their wheeled configuration after landing. The solution? Have the robot begin its descent with the props—soon to become wheels—already positioned nearly downward, allowing it to land ready to roll.
Although each propeller still has its own motor for flight, a single central motor controls the joint mechanism that folds all the propellers in or out. However, the setup is more complex than it might initially seem.
As the propeller angles shift and the downward airflow begins to interact with the approaching ground, ATMO's flight dynamics change significantly. To account for these shifting variables, the researchers developed a custom algorithm that continuously adjusts the thrust from each propeller in real time.
Thanks to this system, the drone can execute stable "dynamic wheel landings" with its wheels—formerly propellers—already deployed. Once on the ground, it transitions seamlessly into rover mode, zipping forward with a belt drive on each side powering the wheels. Steering is achieved through a differential system that independently controls the speed of each belt drive.
"Here we introduce a dynamic system that hasn't been studied before," says Ioannis Mandralis, lead author of the study. "As soon as the robot begins to morph, you encounter new dynamic couplings—different forces interacting in complex ways. The control system has to respond rapidly to all of it."
The Vision – A Robot That Does It All
In robotics, versatility is key. Engineers have long aimed to build machines that can move seamlessly across different environments. Enter the Aerially Transforming Morphobot (ATMO)—a robot designed to fly like a drone and drive like a rover. Unlike traditional designs that switch modes after landing, ATMO morphs mid-air, enabling smooth transitions between flight and ground travel.
Building on Proven Tech – From M4 to ATMO
ATMO builds on Caltech’s earlier creation, the M4 (Multi-Modal Mobility Morphobot). That robot used shrouded propellers that acted as wheels once folded downward after landing. But this design had a flaw: landing on rough terrain could prevent the propellers from folding in properly. ATMO solves this by beginning its descent with the propellers already in the down position—ready to land and roll without delay.
The Morphing Mechanism – One Motor, Many Moves
Each of ATMO's propellers has its own motor for flight, but morphing is handled by a single central motor that adjusts the angle of all the props at once. While that sounds simple, it's actually complex: shifting propeller angles mid-flight changes how the robot flies, requiring careful control of new aerodynamic forces.
Smart Flight – Adapting on the Fly
As the propellers tilt and the ground comes closer, air deflects in new ways, altering ATMO’s flight behavior. To compensate, researchers developed a specialized control algorithm that continuously adjusts the thrust of each propeller in real time. This keeps the robot stable, even during mid-air morphing—crucial for what they call "dynamic wheel landings."
From Sky to Street – Rolling into Action
After landing, ATMO transitions instantly into a ground vehicle. Its folded propellers act as motorized wheels, powered by belt drives on each side. Steering is handled through a differential system, which varies the speed of the drives independently—letting ATMO zip across terrain with agility and control.
Source: NEW ATLAS
Cite this article:
Priyadharshini S (2025), Flying Robot Transforms Mid-Air to Land and Roll-on Wheels, AnaTechMaz, pp. 185
Recent Post
-
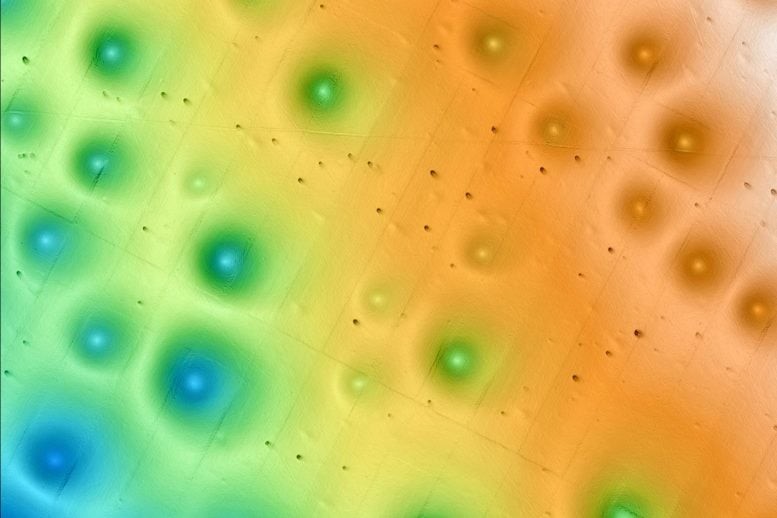
How Robots Uncovered A 280,000-Year-Old Seafloor Secret Beneath Big Sur
Extensive research led by the Monterey Bay Aquarium Research Institute....
-

DJI Aims to Expand Creative Possibilities with the Triple-Camera Mavic 4 Pro
The Mavic 4 Pro’s triple-camera system provides “aerial storytellers....
-

Rivr’s Dog-Like Robots Team Up with Veho Vans to Tackle The ‘Last 100 Yards’ of Parcel Delivery in Austin
Most delivery automation stops at the curb, but for Veho and Zurich-based....
-

Robot 3D-Printed in One Piece Upside-Down, Then Walks out of the Printer
Although soft-bodied robots have many potential applications, they are usually....
-
Flying Robot Transforms Mid-Air to Land and Roll-on Wheels
Imagine a robot capable of transforming between a flying drone ....
-
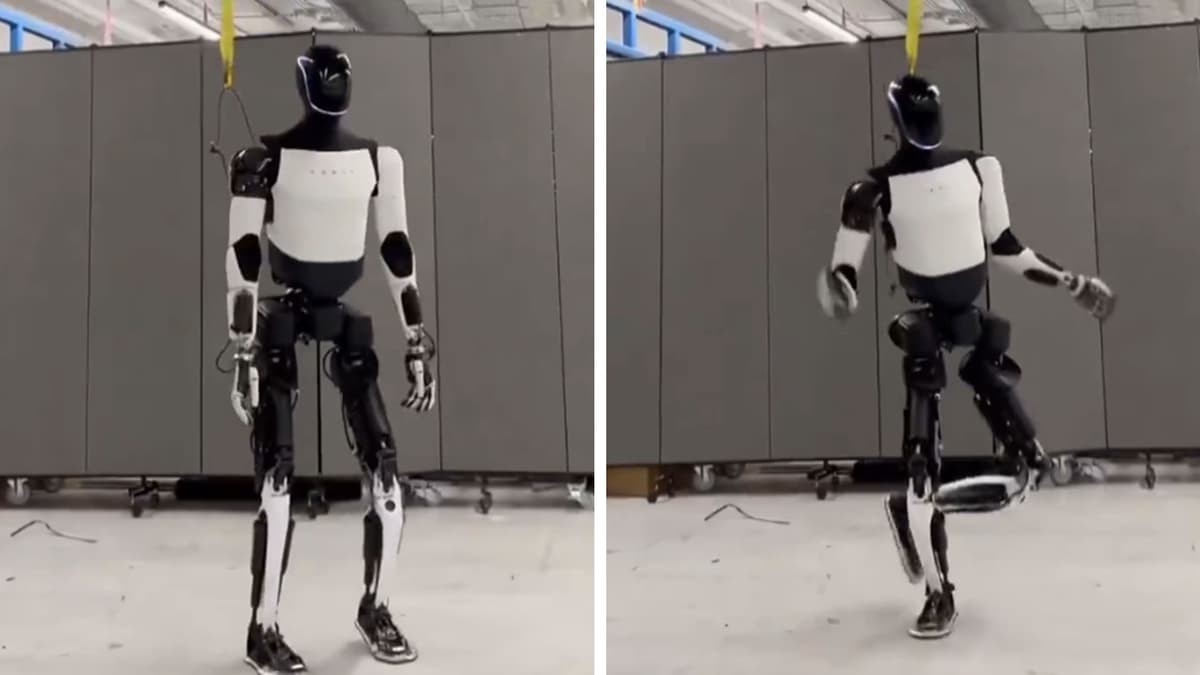
Elon Musk Unveils Dancing Tesla Optimus Robot in New Video
Elon Musk recently posted a video on his X account showcasing the Tesla....
-

Japan's SPIDAR Robot Crawls and Flies with Precision Thrust Control
Researchers at the University of Tokyo have developed a groundbreaking....
-
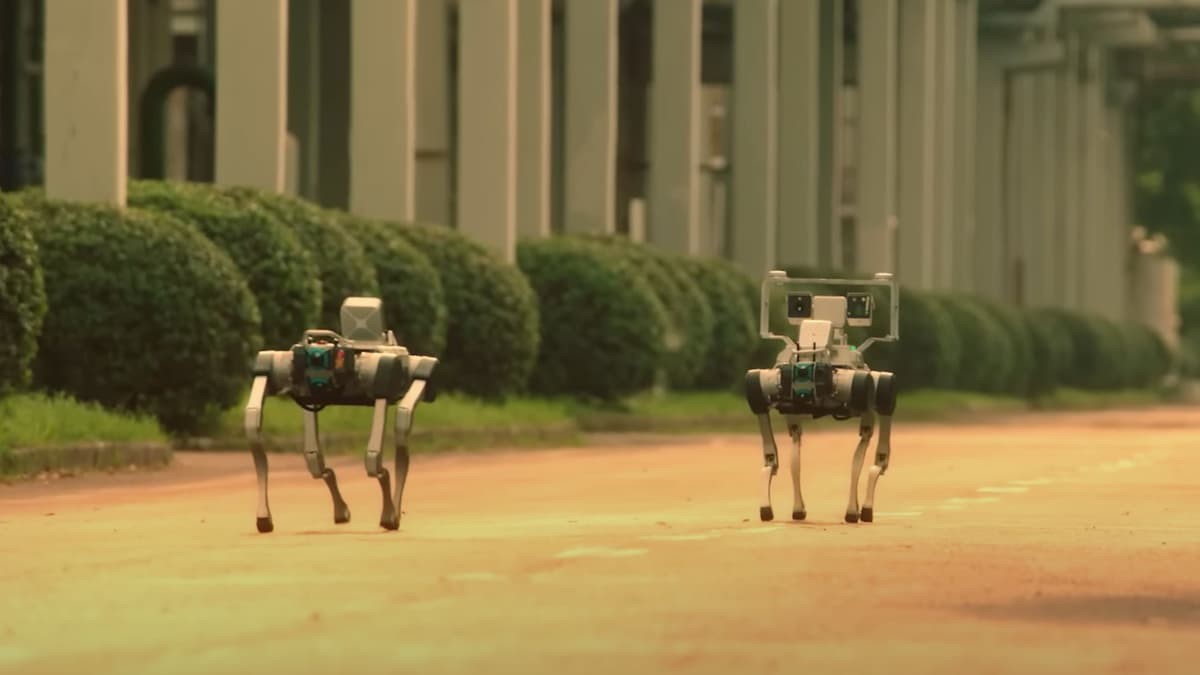
Singapore Embraces Robot Dogs for a Smarter, Safer Future
Robot dogs are taking on an expanding range of roles in Singapore....
-
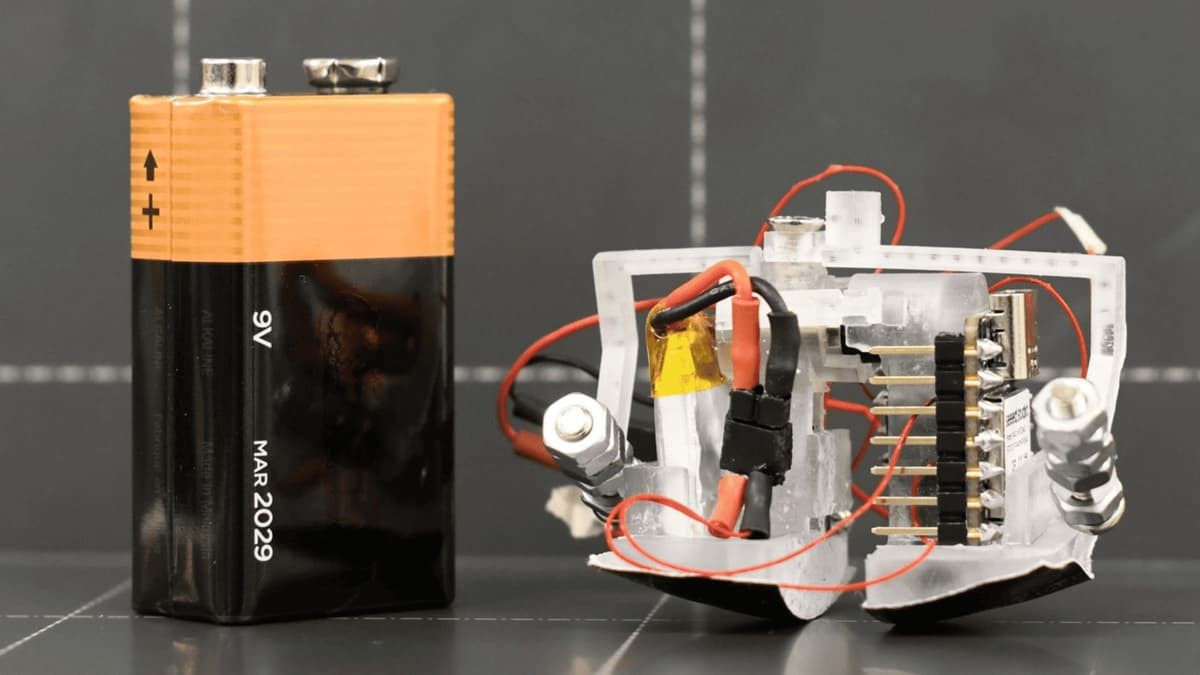
Palm-Sized Bipedal Robot Zippy Runs, Climbs, And Takes on Rescue Missions
Bipedal robots aren’t just human-sized machines with arms and ....
-

Mini Brain-Inspired Tech Enables Humanoid Robots to See and Think in Real Time
Researchers at RMIT University in Australia have developed an advanced....
-

Centipede-Like Robots Offer a More Affordable Solution for Weed Control in Vineyards and Blueberry Farms
Inspired by the elongated, flexible movement of centipedes, Atlanta-based ....
-
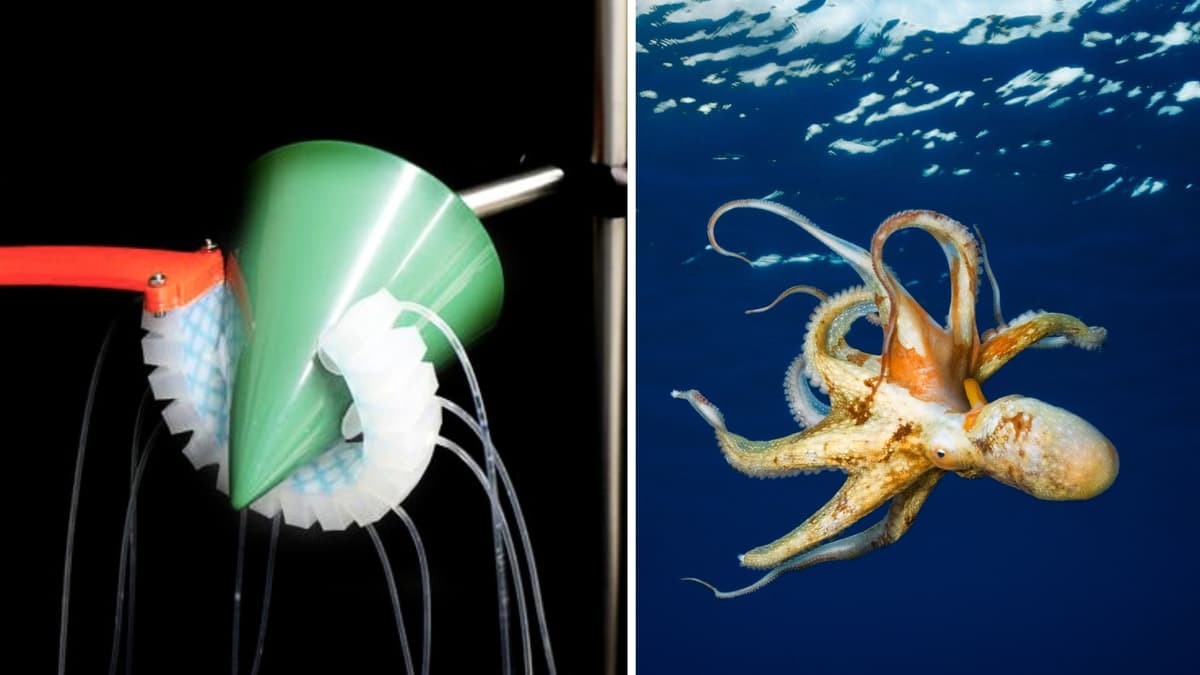
An Octopus-Inspired Robot Can Autonomously Determine How to Grip Objects with High Accuracy
Scientists have developed a soft robot that can autonomously decide how to move....
-

Taiwan Deploys Nurabot, the World's First AI Nurse, to Address Healthcare Challenges
As the world faces a looming shortage of 4.5 million nurses by 2030....
-

U.S. Student Develops Sound-Driven Metamaterial to Enable Remote Control of Underwater Robots
Sound waves are more than just carriers of music and speech—they’re ....
-
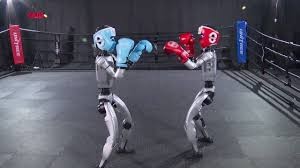
Chinese Humanoid Robots Showcase Advanced Combat Abilities in Lead-Up to World’s First Robot Boxing Match
Humanoid robots in China recently demonstrated impressive combat....