
Japan's SPIDAR Robot Crawls and Flies with Precision Thrust Control
University of Tokyo Unveils SPIDAR: A Robot That Walks and Flies with Precision Control
Researchers at the University of Tokyo have developed a groundbreaking hybrid quadruped robot capable of navigating both air and ground with remarkable versatility and precision.
Named SPIDAR—short for Sensing, Processing, and Intelligent Dynamics for Aerial-ground Robot—this innovative machine features a unique vectorable thrust control system. Each of its limbs is outfitted with a rotor that can tilt in various directions, allowing SPIDAR to seamlessly transition between flying and crawling with impressive agility.

Figure 1. Japan’s SPIDAR Robot.
According to the study abstract, "The experimental results of flight with complex joint motion and consistent crawling demonstrate the feasibility of the proposed thrust control methods for multimodal locomotion."
A Leap Forward in Efficient Locomotion
Over the past decade, significant progress has been made in the field of multimodal robots that can both walk and fly. Legged robots, in particular, offer advantages in rough terrain and object manipulation. SPIDAR builds upon this foundation by incorporating rotors into each limb segment, enabling both stable flight and coordinated crawling.
Previous designs allowed for basic walking and flying but struggled with joint complexity and energy efficiency. A key challenge for SPIDAR is aerodynamic interference—overlapping airflows from vertically aligned rotors—which can disrupt stability and hinder tasks like object grasping.
To address this, the research team implemented an optimization-based control strategy that defines safe rotor tilt limits, preventing interference [1]. They also tackled the issue of low torque in lightweight servos by developing an efficient crawling motion that moves all legs simultaneously without lifting the torso, supported by a hybrid thrust-torque control system.
This approach required careful balance, given the robot's lightweight body. By applying controlled thrust to counteract gravitational forces, SPIDAR achieved greater stability and energy efficiency during crawling.
Hybrid Control and Design Innovation
SPIDAR's four legs consist of two jointed segments, and its symmetrical design allows movement in any direction. Each leg houses a vectorable rotor with dual counter-rotating propellers to neutralize unwanted spinning. These rotors can tilt using dual motors, enabling fine control of airflow direction and intensity for both crawling and flying.
The robot calculates movement based on centre-of-gravity dynamics, treating the body as stable during slow joint actions. A PID controller adjusts the force and angle of each rotor for balanced motion, while an optimization algorithm ensures energy-efficient operation within motor limits.
To avoid rotor collision and airflow overlap, SPIDAR restricts tilt angles based on the relative position of nearby rotors. It uses the rotors not only for lift during flight but also for support during crawling, gently elevating the legs without destabilizing the body.
When all legs are airborne, SPIDAR computes the ideal balance between rotor-generated lift and ground pressure. This hybrid control method allows it to perform both delicate crawling and stable flight with cooperative coordination between joints and thrust.
Performance and Future Potential
Testing demonstrated that SPIDAR is capable of steady crawling and controlled flight. Despite the challenge of joint movement, three-legged designs maintained excellent aerial stability across various conditions. Crawling trials showed accurate forward movement, though instability emerged during rapid leg lifts due to weak servos. The thrust-assisted crawling mode proved effective, validating SPIDAR’s hybrid locomotion capabilities.
To address remaining issues, researchers plan to introduce thrust-based feedback control that accounts for joint dynamics, replacing the simpler joint-control system. Future tests will also assess SPIDAR’s performance on uneven terrain, such as stairs, and evaluate its potential for whole-body manipulation and object grasping.
Reference
- https://interestingengineering.com/innovation/robot-crawls-flies-with-advanced-thrust
Cite this article:
Keerthana S (2025), Japan’s SPIDAR Robot Crawls and Flies with Precision Thrust Control, AnaTechMaz, pp.187
Recent Post
-
How Robots Uncovered A 280,000-Year-Old Seafloor Secret Beneath Big Sur
Extensive research led by the Monterey Bay Aquarium Research Institute....
-

DJI Aims to Expand Creative Possibilities with the Triple-Camera Mavic 4 Pro
The Mavic 4 Pro’s triple-camera system provides “aerial storytellers....
-

Rivr’s Dog-Like Robots Team Up with Veho Vans to Tackle The ‘Last 100 Yards’ of Parcel Delivery in Austin
Most delivery automation stops at the curb, but for Veho and Zurich-based....
-

Robot 3D-Printed in One Piece Upside-Down, Then Walks out of the Printer
Although soft-bodied robots have many potential applications, they are usually....
-

Flying Robot Transforms Mid-Air to Land and Roll-on Wheels
Imagine a robot capable of transforming between a flying drone ....
-
Elon Musk Unveils Dancing Tesla Optimus Robot in New Video
Elon Musk recently posted a video on his X account showcasing the Tesla....
-
Japan's SPIDAR Robot Crawls and Flies with Precision Thrust Control
Researchers at the University of Tokyo have developed a groundbreaking....
-
Singapore Embraces Robot Dogs for a Smarter, Safer Future
Robot dogs are taking on an expanding range of roles in Singapore....
-
Palm-Sized Bipedal Robot Zippy Runs, Climbs, And Takes on Rescue Missions
Bipedal robots aren’t just human-sized machines with arms and ....
-

Mini Brain-Inspired Tech Enables Humanoid Robots to See and Think in Real Time
Researchers at RMIT University in Australia have developed an advanced....
-

Centipede-Like Robots Offer a More Affordable Solution for Weed Control in Vineyards and Blueberry Farms
Inspired by the elongated, flexible movement of centipedes, Atlanta-based ....
-
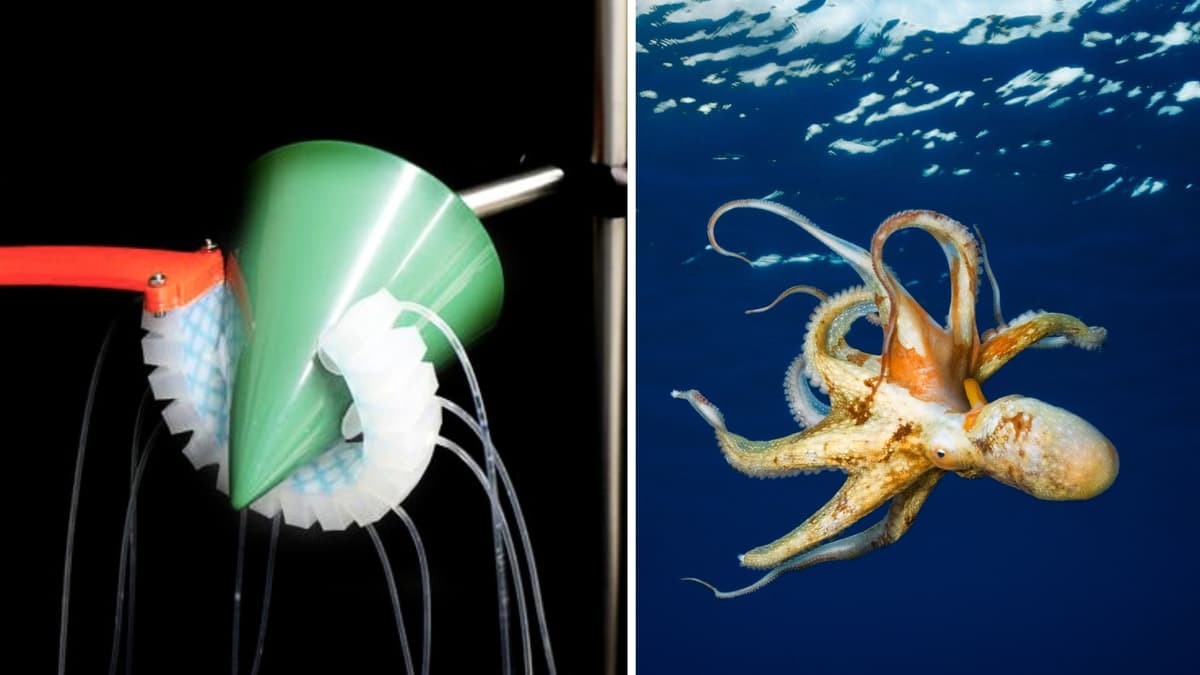
An Octopus-Inspired Robot Can Autonomously Determine How to Grip Objects with High Accuracy
Scientists have developed a soft robot that can autonomously decide how to move....
-

Taiwan Deploys Nurabot, the World's First AI Nurse, to Address Healthcare Challenges
As the world faces a looming shortage of 4.5 million nurses by 2030....
-

U.S. Student Develops Sound-Driven Metamaterial to Enable Remote Control of Underwater Robots
Sound waves are more than just carriers of music and speech—they’re ....
-
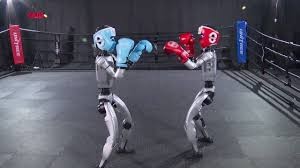
Chinese Humanoid Robots Showcase Advanced Combat Abilities in Lead-Up to World’s First Robot Boxing Match
Humanoid robots in China recently demonstrated impressive combat....