
Helical Ring-Based Soft Robot Achieves Omnidirectional Movement Without Wheels
For decades, roboticists have developed diverse systems capable of navigating complex environments, including land, air, and water. To safely maneuver through dynamic real-world settings without collisions, most robots depend on sensors and cameras.
Researchers at Tsinghua University have developed WHERE-Bot, a wheel-less, everting soft robot that moves by turning its body inside out. Unlike traditional robots, it navigates unstructured environments without relying on sensors to detect obstacles. Introduced in a paper on the arXiv preprint server, WHERE-Bot uses a helical ring-based structure to enable movement in all directions.
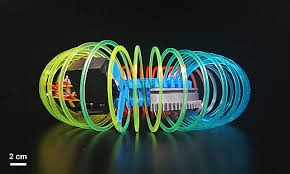
Figure 1. Side view of WHERE-Bot everting and moving toward its heavier side (left)
Senior author Shuguang Li shared that the inspiration for WHERE-Bot came during a lab meeting while playing with a Slinky toy [1]. He realized that connecting the toy’s head and tail allowed it to turn inside out continuously—a motion they termed "everting." This observation led to curiosity about how a modified helical ring structure could move across different environments, including on the ground, inside pipes, underwater, on sand, and even in the air. Figure 1 shows Side view of WHERE-Bot everting and moving toward its heavier side (left).
Li and his team began by investigating the structural and kinetic properties of helical rings—circular structures with a spiral-like shape—to understand their movement on the ground. This research eventually led to the development of WHERE-Bot, a helical ring-based robot capable of everting and moving in unexpected ways.
"At first, it's unclear which direction the robot will move," said Siyuan Feng, lead author of the paper. "When held, all you see is a motor rotating the helical ring along the hub’s circumference. However, once the ring contacts the ground, its uneven mass distribution creates asymmetric friction, causing the robot to self-rotate and move toward the heavier side, resulting in an orbiting motion along a circular path."
A key feature of WHERE-Bot is that its ability to move in any direction comes from its mechanical design rather than relying on sensors for navigation. This allows it to traverse unpredictable environments without detecting obstacles or pre-planning movements.
"We turned a simple spring toy into a mobile robot with remarkable kinematic properties," said Li. "Like a quick-reacting reptile, the robot everts its spring when it encounters an obstacle, enabling it to retreat and continue moving without getting stuck. This adaptive behavior not only helps it explore uncharted terrains but also paves the way for exciting practical applications."
Li and his team aim to further enhance WHERE-Bot’s capabilities, enabling it to navigate an even broader range of environments. Potential applications include remotely mapping caves and underground spaces, excavating sand-based terrains to uncover hidden structures, inspecting pipelines, and even inspiring new omnidirectional bumper cars or recreational robotic systems.
"In our future research, we plan to improve both the durability and versatility of WHERE-Bot," said co-author Dengfeng Yan. "Currently, its plastic spring is prone to breaking under significant deformation [2]. We intend to explore stronger materials for a more robust design that can handle complex terrains.
"Additionally, we plan to refine the robot by integrating functional elements such as high-friction skins, propellers, and barbs. This will allow us to further investigate and expand its movement capabilities across diverse environments, including land, pipelines, water, sand, and even air."
References:
- https://techxplore.com/news/2025-03-wheel-helical-based-soft-robot.html
- https://arxiv.org/abs/2503.07245
Cite this article:
Janani R (2025), Helical Ring-Based Soft Robot Achieves Omnidirectional Movement Without Wheels, AnaTechMaz, pp. 150
Recent Post
-

World's First AI-Enhanced Super-Humanoid Robot for Industrial Work
Mech features dual arms, a 5.4-meter arm span, and a 132....
-

China's Robot Dog Now Features One-Touch Navigation for Rescue Operations in Challenging Terrains
A leading Chinese developer of quadrupedal robotics has....
-

A New Robotic Arm Inspired by An Elephant's Trunk Showcases an Ideal Balance of Strength and Flexibility
Researchers have developed a flexible robotic arm inspired by...
-
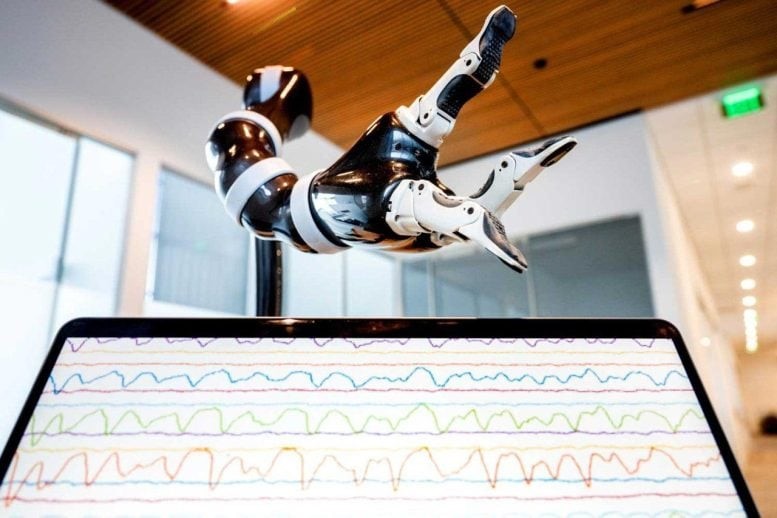
Paralyzed Man Uses Mind Power to Control Robotic Arm
A brain-computer interface (BCI) operated successfully for a...
-

New York Proposes Law to Prohibit Civilians from Arming Robots
Supporters of the bill argue that allowing civilians to arm robots...
-

Like Babies and Dancers, This Robot Learns by Observing Itself
Humans are among the few species capable of recognizing...
-

Introducing The Coffee-Making Robot That Learns and Adapts Instantly
Robots have long thrived in structured settings like factories...
-

Nvidia and Google DeepMind to Power Disney’s Adorable Robots
Nvidia, Disney Research, and Google DeepMind are...
-
Nvidia Unveils Groot N1: A Foundation Model for Humanoid Robotics
Revealed at GTC 2025 in San Jose, Groot N1 is a...
-

seaperch: A Mission-Driven Robot
The SeaPerch underwater robot is a widely used...
-

Researchers Investigate the Development of Shape-Shifting, T-1000-Like Robots
Scientists have designed small robots capable of working...
-

Not So Secure: Drones Can Now Eavesdrop on Underwater Communications
Yasaman Ghasempour, an assistant professor of...
-
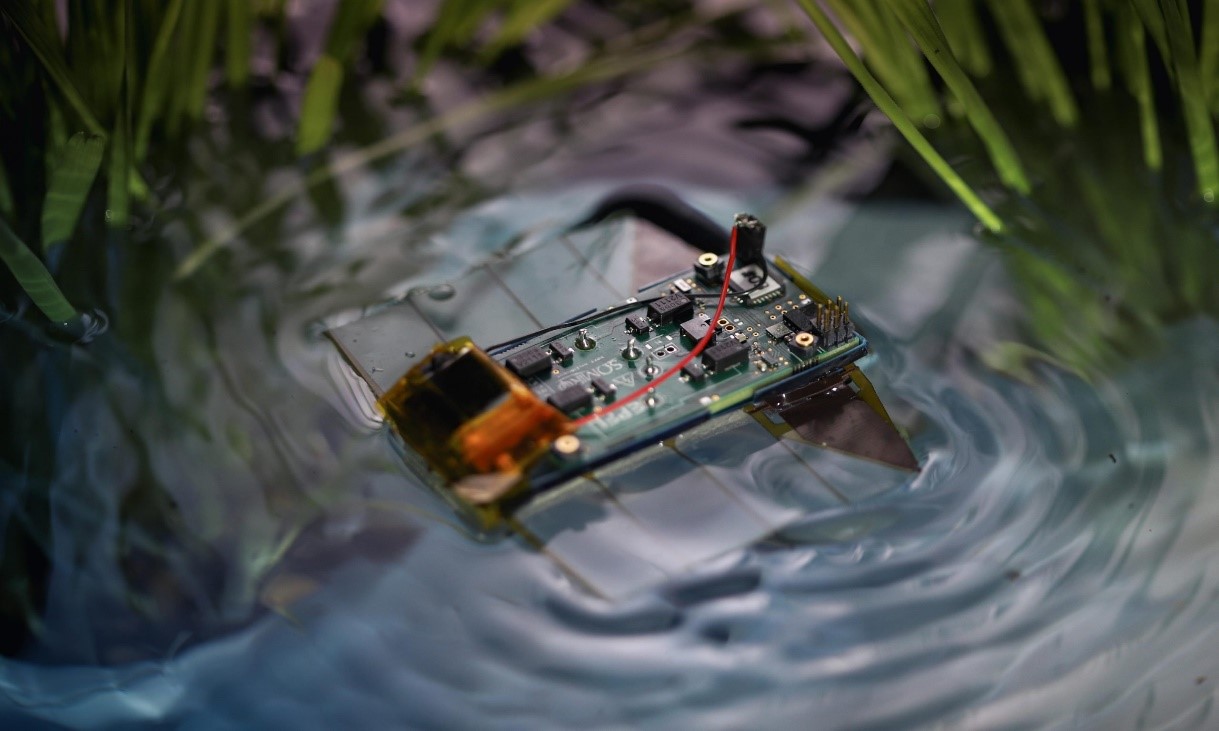
Scientists Create a 6-Gram Mini Robot Capable of Swimming Through Tight Spaces Effortlessly
EPFL engineers have developed a flexible swimming robot...
-
Multidirectional Artificial Muscle Paves the Way for Soft, Flexible Robots
MIT engineers have developed a method to grow artificial...
-
Helical Ring-Based Soft Robot Achieves Omnidirectional Movement Without Wheels
For decades, roboticists have developed diverse systems capable of navigating...