
Like Babies and Dancers, This Robot Learns by Observing Itself
Inspiration from Babies and Dancers Observing Their Reflections
Humans are among the few species capable of recognizing their own reflections and learning from them. Young children, upon seeing their unfamiliar bodies in mirrors or ponds, observe, analyze, and develop a “mental model” of themselves in 3D space. This process aids in the development of movement, coordination, and even early language skills. Researchers refer to this phenomenon as “self-simulation,” and it extends beyond childhood. Dancers, for example, frequently use mirrors to refine their movements, correct their posture, and receive instant visual feedback.

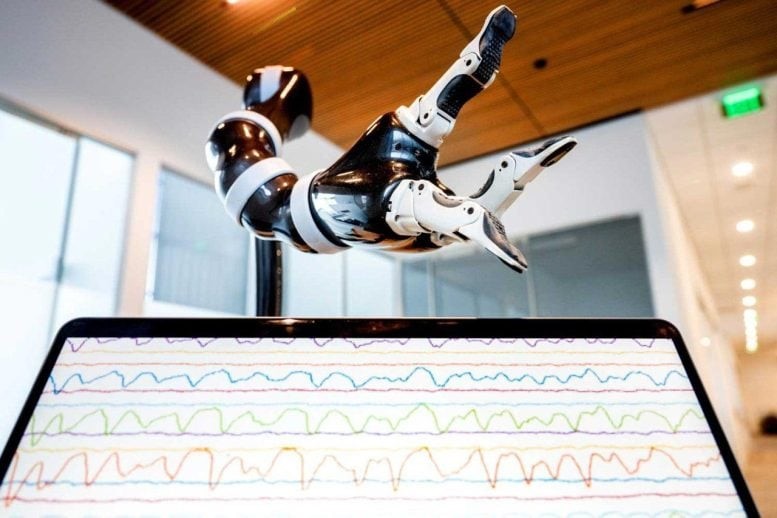
Figure 1. Robot Learning Through Self-Observation.
Teaching Robots to Self-Simulate
For this study, researchers explored whether an autonomous robot could develop a self-simulation process similar to that of humans. Typically, roboticists train AI models in highly detailed, carefully curated virtual simulations before applying them to physical machines. However, this approach has significant limitations. Advanced simulations take considerable time to perfect and often require extensive engineering expertise. More importantly, they can be rigid—if a robot encounters an unexpected scenario outside its training parameters, it may struggle to respond effectively. Figure 1. Robot Learning Through Self-Observation.
A Self-Supervised Learning Framework for Robots
To achieve this, researchers developed a new “self-supervised learning framework” composed of three deep neural networks. The process begins with a coordinate encoder, which analyzes raw video footage of the robot captured by a single camera—similar to how humans observe themselves in a mirror. Next, a kinematic encoder converts this video into a binary image, highlighting the robot’s joints and key movement areas. Finally, a predictive model translates this data into real-world motion instructions for the robot's physical arm.
Robot Arm Adapted to Damage in Real Time
To test their new learning framework, researchers put the robot arm through a series of basic tasks. First, they demonstrated that the arm could avoid an obstacle—such as a cardboard-like divider—simply by analyzing a video frame of itself successfully swinging past the barrier.
More impressively, the same model enabled the robot to adapt to damage. The researchers simulated a scenario where an overly heavy load had bent the robot’s limb by 3D-printing a damaged version of its arm and attaching it to the system. After observing video footage of itself with the altered limb, the model refined its predictions and adjusted the robot’s movements accordingly, effectively compensating for the simulated damage.
Self-Simulation Could Reduce Human Intervention in Robotics
The self-simulation method outlined in the study has the potential to enhance a wide range of future autonomous robots, from those used in manufacturing to environmental and industrial monitoring. By learning from camera data and adapting to damage, these robots could minimize downtime and reduce the need for human intervention—particularly in hazardous environments where repairs might put workers at risk.
Self-repairing capabilities could be especially valuable in fields like robot-assisted elder and child care, where mechanical failures could directly impact a person's well-being.
Even in more everyday scenarios, this approach offers benefits. The researchers suggest that a self-repairing vacuum robot, for example, could adjust its movement after bumping into a wall and misaligning a component. In other words, future Roombas navigating cluttered apartments might finally stand a fighting chance.
Robots Must Learn to Be Self-Sufficient
“We humans cannot afford to constantly baby these robots, repair broken parts, and adjust performance,” said Columbia Professor and paper co-author Hod Lipson. “Robots need to learn to take care of themselves.”
Source: POPULAR SCIENCE
Cite this article:
Priyadharshini S (2025),”Like Babies and Dancers, This Robot Learns by Observing Itself" , AnaTechMaz, pp.141
Recent Post
-

World's First AI-Enhanced Super-Humanoid Robot for Industrial Work
Mech features dual arms, a 5.4-meter arm span, and a 132....
-

China's Robot Dog Now Features One-Touch Navigation for Rescue Operations in Challenging Terrains
A leading Chinese developer of quadrupedal robotics has....
-

A New Robotic Arm Inspired by An Elephant's Trunk Showcases an Ideal Balance of Strength and Flexibility
Researchers have developed a flexible robotic arm inspired by...
-
Paralyzed Man Uses Mind Power to Control Robotic Arm
A brain-computer interface (BCI) operated successfully for a...
-

New York Proposes Law to Prohibit Civilians from Arming Robots
Supporters of the bill argue that allowing civilians to arm robots...
-
Like Babies and Dancers, This Robot Learns by Observing Itself
Humans are among the few species capable of recognizing...
-

Introducing The Coffee-Making Robot That Learns and Adapts Instantly
Robots have long thrived in structured settings like factories...
-

Nvidia and Google DeepMind to Power Disney’s Adorable Robots
Nvidia, Disney Research, and Google DeepMind are...
-
Nvidia Unveils Groot N1: A Foundation Model for Humanoid Robotics
Revealed at GTC 2025 in San Jose, Groot N1 is a...
-

seaperch: A Mission-Driven Robot
The SeaPerch underwater robot is a widely used...
-

Researchers Investigate the Development of Shape-Shifting, T-1000-Like Robots
Scientists have designed small robots capable of working...
-

Not So Secure: Drones Can Now Eavesdrop on Underwater Communications
Yasaman Ghasempour, an assistant professor of...
-
Scientists Create a 6-Gram Mini Robot Capable of Swimming Through Tight Spaces Effortlessly
EPFL engineers have developed a flexible swimming robot...
-
Multidirectional Artificial Muscle Paves the Way for Soft, Flexible Robots
MIT engineers have developed a method to grow artificial...
-
Helical Ring-Based Soft Robot Achieves Omnidirectional Movement Without Wheels
For decades, roboticists have developed diverse systems capable of navigating...