
Improved 6D Pose Estimation Boosts Robotic Object Handling
Recent advancements in 6D object pose estimation offer promising improvements for robotics, AR, VR, and autonomous navigation. A study published in the International Journal of Computational Science and Engineering presents a method that enhances accuracy, generalization, and efficiency in determining an object's position and orientation from a single image. This breakthrough could greatly enhance robotic interactions, particularly in dynamic or obstructed environments.

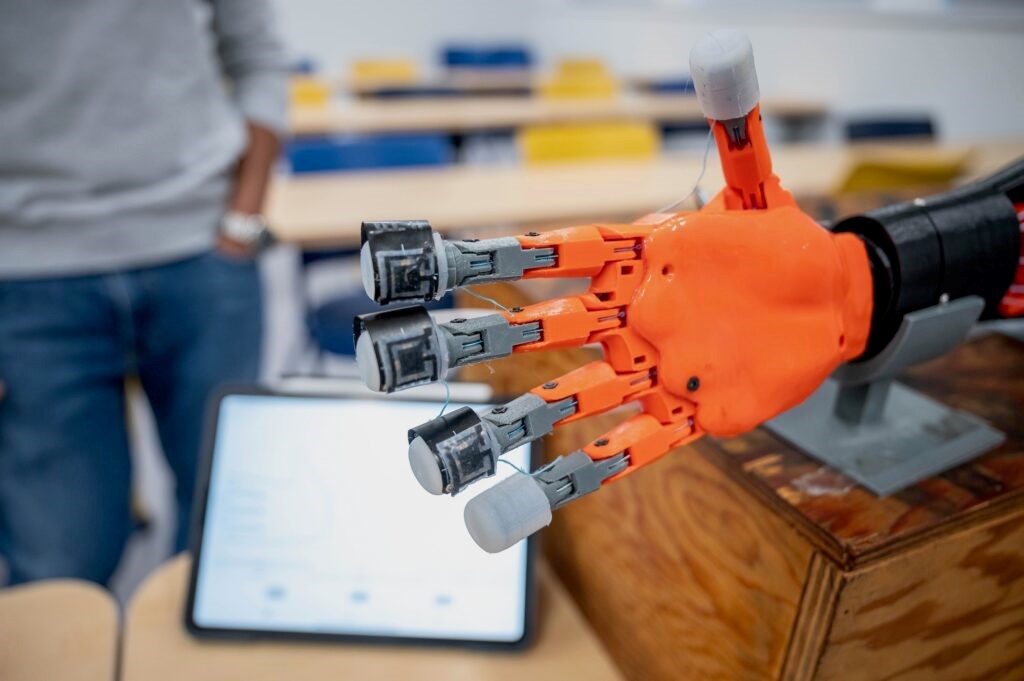
Figure 1. Improved 6D Pose Estimation Boosts Robotic Object Handling
In robotics, 6D object pose estimation involves determining an object's position and orientation in 3D space, accounting for six degrees of freedom—three for translation (X, Y, Z) and three for rotation [1]. This capability is essential for autonomous systems, including robots and AR/VR applications. Figure 1 shows Improved 6D Pose Estimation Boosts Robotic Object Handling.
However, challenges arise due to object shape variations, different viewpoints, and high computational demands. Current deep-learning approaches depend on large datasets of objects captured from multiple angles but often struggle with unseen objects or those differing from the training data.
The new technique, developed by Zhizhong Chen, Zhihang Wang, Xue Hui Xing, and Tao Kuai from the Northwest Institute of Mechanical and Electrical Engineering in Xianyang City, China, tackles these challenges by integrating rotation-invariant features into a 3D convolutional neural network.
This enables the system to analyze an object's 3D point cloud independently of its orientation, resulting in more precise pose predictions even when the object is rotated or viewed from novel angles. By employing canonical coordinates—a consistent frame of reference unaffected by rotation—the network enhances its ability to generalize to new poses, addressing a key limitation of traditional methods.
The new approach not only enhances accuracy but also improves efficiency, requiring less training data and computational power [2]. This makes it better suited for real-time, real-world applications.
References:
- https://arxiv.org/html/2309.14265v2
- https://techxplore.com/news/2025-03-6d-pose-method-robotic.html
Cite this article:
Janani R (2025), Improved 6D Pose Estimation Boosts Robotic Object Handling, AnaTechMaz, pp. 153
Recent Post
-

EPFL's Origami-Inspired Robot Revolutionizes Shape-Shifting Technology
In a remarkable feat of engineering, Jamie Paik and her team...
-
Next-Generation Robot Skin: Advancing Robotics and Prosthetics with Smart, Stretchable Sensors
In an innovative collaboration...
-

Are We Ready for Robots to Replace Our Friendly Delivery Folks
The world of deliveries is undergoing a futuristic transformation, with tech giants like Amazon and Walmart...
-

Robotic Chemist Discovers How to Make Oxygen from Martian Minerals
A chemist robot, operating autonomously in a laboratory...
-
Unveiling the Hidden Weaknesses in Soft Robotics: A Closer Look at Conical Shells
Soft robotics, with its squishable and deformable components...
-

A Leap Forward in Material Diversity and Robotic Innovation
The realm of 3D printing has undergone a revolutionary transformation, propelled...
-

Pipeline Inspections with Mobile Robot Technology
In a groundbreaking study, the University of Bristol, under the leadership of Professor...
-

ChromoSense: A Colorful Breakthrough in Robotic Sensing Technology
In the dynamic realm of robotics, researchers at the Reconfigurable...
-
A Snail-Inspired Robot Takes on the Fight Against Ocean Microplastics
In a world grappling with the pervasive issue of plastic pollution, scientists are turning to nature...
-

Unleashing the Dragon Firefighter: A Revolutionary Robotic Solution to Combat Fires
In the world of firefighting, a new and innovative ally may soon join...
-

Drone Technology for Construction Safety
In the realm of drone innovation, Professor Kenji Shimada and his team have achieved a milestone...
-
Meet Mugatu, the Single-Motor Steerable Bipedal Marvel
In the ever-evolving landscape of robotics, breakthroughs are continually reshaping the possibilities...
-

Soft Robotics Offers Hope for Freezing Symptoms of Parkinson’s Disease
Parkinson's disease, affecting over 9 million people worldwide, often brings...
-

The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable...
-
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea...