
Unveiling the Hidden Weaknesses in Soft Robotics: A Closer Look at Conical Shells
Soft robotics, with its squishable and deformable components, has been a fascinating field pushing the boundaries of mechanical tasks. The latest research from the University of Cambridge delves into the load-bearing capacity of conical shells made from soft materials, uncovering potential weaknesses that could impact the performance of morphing cones, a key element in soft robotics.
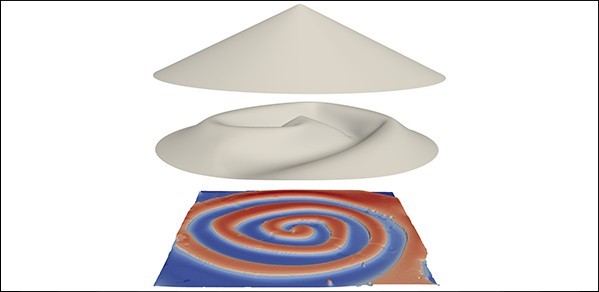
Figure 1. A Closer Look at Conical Shells. (Credit: University of Cambridge)
Figure 1 shows a closer look at conical shells. In this study, the researchers focused on conical liquid crystal elastomer (LCE) shells, a lightweight and shape-morphing material commonly used in soft robotics. Through a combination of theory, numerical simulations, and experiments, they aimed to understand the lifting, loading, and buckling behaviors of these thin, morphing LCE films known for their ability to lift thousands of times their own weight.
The findings, published in the journal Physical Review Letters with a synopsis in Physics Magazine, mark the first-ever calculation of the strength of thin-walled cones. Daniel Duffy, a PhD student in the Department of Engineering at the University of Cambridge and co-author of the study, emphasized the significance of this work for designers of soft robots using shape-morphing cones as powerful actuators.
Duffy explained, "Our work is the first to calculate and understand just how strong a thin-walled cone is. That is, of course, important for designers of soft robots that might utilize shape morphing cones as powerful actuators." However, the research also unveiled a critical weakness in these thin cones. When compressed, they deform predominantly in an outer boundary layer, leading to buckling at much smaller loads than previously predicted.
Taking a broader perspective, the study's insights extend beyond the realm of soft robotics. Duffy highlighted the discovery that free unclamped edges can significantly weaken thin structures, impacting various mechanisms beyond morphing cones. This revelation opens avenues for further exploration into the underlying principles that may have implications for structures unrelated to soft robotics.
As the field of soft robotics continues to evolve, this research not only contributes to the design and improvement of shape-morphing cones but also sheds light on fundamental principles that could shape the future of soft, deformable structures in robotics and beyond.
Source: University of Cambridge
Cite this article:
Hana M (2023), Unveiling the Hidden Weaknesses in Soft Robotics: A Closer Look at Conical Shells, AnaTechMaz, pp. 7
Recent Post
-

Robotic Dog Is Superior to Humans at Identifying Invasive Fire Ant Nests
Researchers have found that robotic dogs equipped with artificial intelligence.....
-
Smart Materials Paving the Way for Medical Microrobots!
Are you ready for a glimpse into the future of medical procedures?....
-

EPFL's Origami-Inspired Robot Revolutionizes Shape-Shifting Technology
In a remarkable feat of engineering, Jamie Paik and her team ...
-
Next-Generation Robot Skin: Advancing Robotics and Prosthetics with Smart, Stretchable Sensors
In an innovative collaboration between researchers at the University...
-

Are We Ready for Robots to Replace Our Friendly Delivery Folks
The world of deliveries is undergoing a futuristic transformation, ...
-

Robotic Chemist Discovers How to Make Oxygen from Martian Minerals
A chemist robot, operating autonomously in a laboratory, ...
-
Unveiling the Hidden Weaknesses in Soft Robotics: A Closer Look at Conical Shells
Soft robotics, with its squishable and deformable components,...
-

A Leap Forward in Material Diversity and Robotic Innovation
The realm of 3D printing has undergone a revolutionary transformation...
-

Pipeline Inspections with Mobile Robot Technology
In a groundbreaking study, the University of Bristol, under the leadership...
-

chromosense: A Colorful Breakthrough in Robotic Sensing Technology
In the dynamic realm of robotics, researchers at the Reconfigurable...
-
A Snail-Inspired Robot Takes on the Fight Against Ocean Microplastics
In a world grappling with the pervasive issue of plastic pollution,...
-

Unleashing the Dragon Firefighter: A Revolutionary Robotic Solution to Combat Fires
In the world of firefighting, a new and innovative ally may soon ...
-

Drone Technology for Construction Safety
In the realm of drone innovation, Professor Kenji Shimada and his ...
-
Meet Mugatu, the Single-Motor Steerable Bipedal Marvel
In the ever-evolving landscape of robotics, breakthroughs...
-

Soft Robotics Offers Hope for Freezing Symptoms of Parkinson’s Disease
Parkinson's disease, affecting over 9 million people worldwide...