
Engineers Develop Tiny Wireless Flying Robot
Inspired by nature, engineers at UC Berkeley have developed a tiny flying robot that hovers, maneuvers, and precisely hits targets—just like a bumblebee. Measuring under 1 cm in diameter and weighing only 21 milligrams, it's the world’s smallest wireless robot with controlled flight.
Lin highlighted that bees possess exceptional flight skills—navigating, hovering, and pollinating—capabilities that similar-scale flying robots have struggled to replicate. "This robot can be wirelessly controlled to reach and strike a target, imitating how a bee collects nectar and departs," said Lin, a Distinguished Professor of Mechanical Engineering at UC Berkeley.
Lin is the senior author of a study on the robot, published on March 28 in Science Advances.

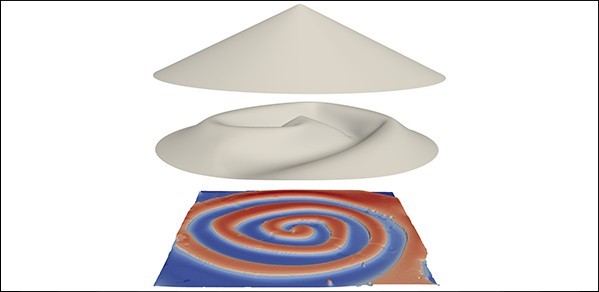
Figure 1. Tiny Magnetic Flying Robot Spins to Generate Lift
For flight, a robot needs both a power source, like a battery, and flight control electronics—challenges for ultra-small, lightweight devices [1]. To solve this, Lin and his UC Berkeley team designed a system powered and guided by an external magnetic field. Figure 1 shows Tiny Magnetic Flying Robot Spins to Generate Lift.
Shaped like a tiny propeller, the robot features two small magnets. When exposed to a magnetic field, these magnets attract and repel, spinning the propeller and generating lift. By adjusting the field's strength, researchers can precisely control the robot’s flight path.
The closest comparable flying robot is 2.8 cm in diameter—almost three times larger than this new design.
"Tiny flying robots are ideal for navigating small, complex spaces," said study co-first author Fanping Sui, a recent Ph.D. graduate from UC Berkeley. "They could assist in artificial pollination or inspect confined areas like the inside of a pipe."
At present, the robot can only fly passively, meaning it lacks onboard sensors to detect its position or trajectory, and cannot adjust its movements in real-time. While it can follow precise flight paths, any environmental change—such as a strong gust of wind—could throw it off course.
"In the future, we aim to integrate active control, enabling the robot to adjust its attitude and position in real time," said Wei Yue, co-first author of the study and a graduate student in Liwei Lin's lab.
Operating the robot currently requires a strong magnetic field from an electromagnetic coil. However, further miniaturization—reducing its size to less than 1 mm in diameter, about the size of a gnat—could make it light enough to be controlled by weaker magnetic fields, such as those from radio waves.
Beyond the bumblebee-inspired flying robot, Lin's team has also developed a cockroach-inspired robot that can scurry across surfaces and withstand being stepped on . Meanwhile, Yue is working on "swarming" robots that can collaborate like ants to complete complex tasks beyond the capability of a single robot.
"I'm working with 5-millimeter-scale robots that can crawl, roll, and spin," Yue said. "They can form chains, arrays, or tackle even more challenging tasks together [2]. These robots could potentially be used in minimally invasive surgery, where multiple units could be injected into the body to form stents, dissolve clots, or perform other medical procedures."
References:
- https://news.berkeley.edu/2025/03/28/uc-berkeley-engineers-create-worlds-smallest-wireless-flying-robot/
- https://techxplore.com/news/2025-03-world-smallest-wireless-flying-robot.html
Cite this article:
Janani R (2025), Engineers Develop Tiny Wireless Flying Robot, AnaTechMaz, pp. 152
Recent Post
-

EPFL's Origami-Inspired Robot Revolutionizes Shape-Shifting Technology
In a remarkable feat of engineering, Jamie Paik and her team...
-
Next-Generation Robot Skin: Advancing Robotics and Prosthetics with Smart, Stretchable Sensors
In an innovative collaboration...
-

Are We Ready for Robots to Replace Our Friendly Delivery Folks
The world of deliveries is undergoing a futuristic transformation, with tech giants like Amazon and Walmart...
-

Robotic Chemist Discovers How to Make Oxygen from Martian Minerals
A chemist robot, operating autonomously in a laboratory...
-
Unveiling the Hidden Weaknesses in Soft Robotics: A Closer Look at Conical Shells
Soft robotics, with its squishable and deformable components...
-

A Leap Forward in Material Diversity and Robotic Innovation
The realm of 3D printing has undergone a revolutionary transformation, propelled...
-

Pipeline Inspections with Mobile Robot Technology
In a groundbreaking study, the University of Bristol, under the leadership of Professor...
-

ChromoSense: A Colorful Breakthrough in Robotic Sensing Technology
In the dynamic realm of robotics, researchers at the Reconfigurable...
-
A Snail-Inspired Robot Takes on the Fight Against Ocean Microplastics
In a world grappling with the pervasive issue of plastic pollution, scientists are turning to nature...
-

Unleashing the Dragon Firefighter: A Revolutionary Robotic Solution to Combat Fires
In the world of firefighting, a new and innovative ally may soon join...
-

Drone Technology for Construction Safety
In the realm of drone innovation, Professor Kenji Shimada and his team have achieved a milestone...
-
Meet Mugatu, the Single-Motor Steerable Bipedal Marvel
In the ever-evolving landscape of robotics, breakthroughs are continually reshaping the possibilities...
-

Soft Robotics Offers Hope for Freezing Symptoms of Parkinson’s Disease
Parkinson's disease, affecting over 9 million people worldwide, often brings...
-

The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable...
-
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea...