
Engineers Develop a System for Drones to Navigate and Determine Their Position in Darkness and Indoor Environments
MIT researchers have developed MiFly, a system that enables drones to determine their position indoors, even in dark and low-visibility environments. Unlike traditional drones that rely on GPS, computer vision, or lidar—methods that struggle in such conditions—MiFly uses radio frequency (RF) waves reflected from a single tag to autonomously self-localize. This advancement could allow autonomous drones to efficiently transport inventory across large warehouses, navigating complex indoor spaces with precision.
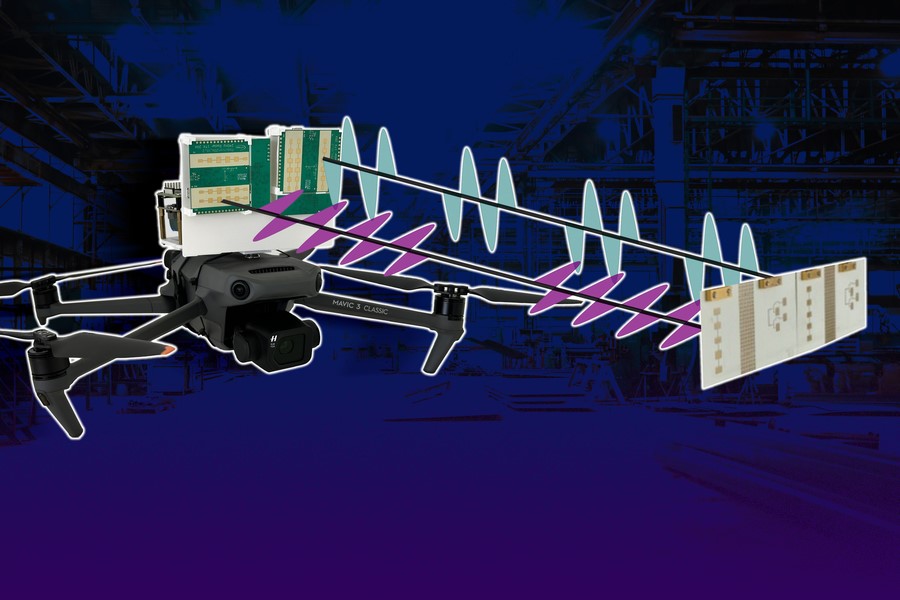
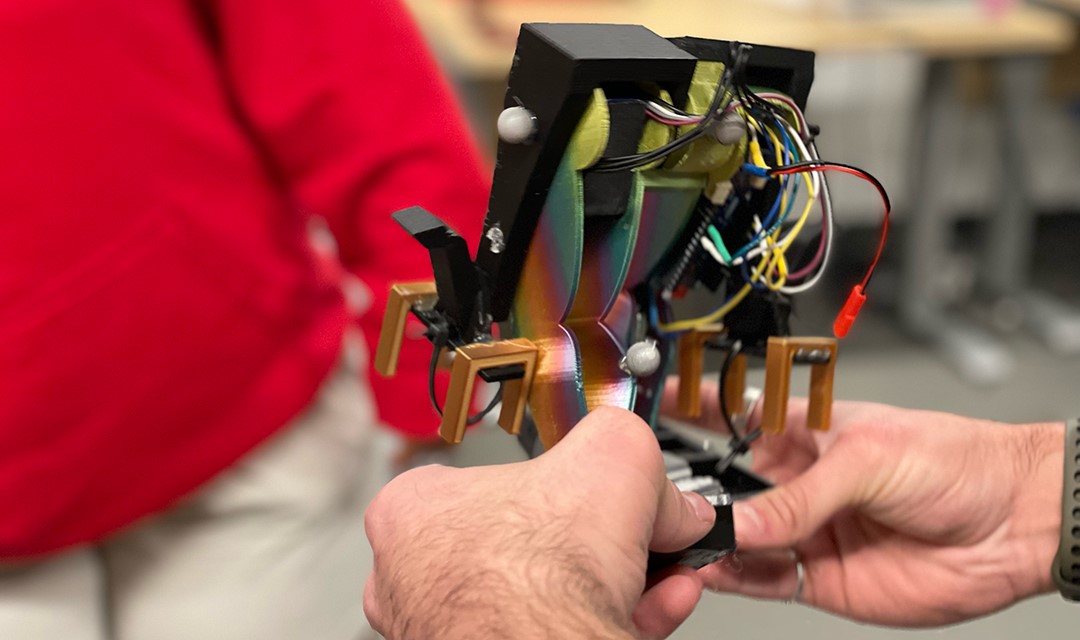
Figure 1. New System Enables Drones to Navigate and Self-Locate in Dark and Indoor Spaces.
MiFly enables self-localization using just one small, sticker-like tag, making it a more cost-effective and easier-to-implement solution than systems requiring multiple tags. Additionally, since the MiFly tag reflects signals from the drone instead of generating its own, it operates with very low power. Figure 1 shows New System Enables Drones to Navigate and Self-Locate in Dark and Indoor Spaces.
Two commercially available radars mounted on the drone allow it to determine its position relative to the tag. These measurements are then combined with data from the drone’s onboard computer, enabling it to estimate its trajectory accurately.
Through extensive flight experiments in indoor environments, researchers found that MiFly consistently localized drones with an accuracy of fewer than 7 centimeters.
“As our understanding of perception and computing improves, we often overlook signals beyond the visible spectrum. By shifting our focus from GPS and computer vision to millimeter waves, we've unlocked new possibilities for drones in indoor environments,” says Fadel Adib, associate professor in MIT’s Department of Electrical Engineering and Computer Science, director of the Signal Kinetics group in the MIT Media Lab, and senior author of the MiFly study.
Adib collaborated with co-lead authors and research assistants Maisy Lam and Laura Dodds, former postdoc Aline Eid (now an assistant professor at the University of Michigan), and Jimmy Hester, CTO and co-founder of Atheraxon, Inc. Their research will be presented at the IEEE Conference on Computer Communications.
Backscattered Signals
To enable drones to self-localize in dark, indoor environments, researchers leveraged millimeter wave signals, commonly used in modern radars and 5G communication systems. These waves function in darkness and can penetrate everyday materials like cardboard, plastic, and interior walls.
The goal was to develop a cost-effective system that required only one tag for commercial viability. To achieve this while maintaining low power consumption, the team designed a backscatter tag that reflects millimeter wave signals emitted by the drone’s onboard radar, allowing the drone to use these reflections for self-localization.
A key challenge was distinguishing signals reflected from the tag versus those bouncing off other surfaces in the environment. The researchers solved this using a technique called modulation, adjusting the tag to add a small frequency shift to the signals it scatters back.
“Now, the reflections from the surrounding environment come back at one frequency, but the reflections from the tag come back at a different frequency. This allows us to separate the responses and just look at the response from the tag,” explains Laura Dodds.
With only one tag and one radar, however, the system could only measure distance. To compute the drone’s precise location, the team needed multiple signals. Instead of adding more tags, they equipped the drone with a second radar, positioning one horizontally and the other vertically. The horizontal radar emitted signals with a horizontal polarization, while the vertical radar emitted vertically polarized signals.
To further enhance accuracy, they integrated polarization into the tag’s antennas, enabling it to isolate signals from each radar.
“Polarized sunglasses filter certain light polarizations while blocking others. We applied the same concept to millimeter waves,” explains Maisy Lam.
Additionally, the researchers assigned different modulation frequencies to the vertical and horizontal signals, further minimizing interference and improving localization precision.
Precise Location Estimation
MiFly’s dual-polarization and dual-modulation system enables drones to determine their spatial location, but navigation requires more than just positioning. Drones move and rotate in various directions, meaning they must estimate their position with respect to six degrees of freedom—accounting for pitch, yaw, and roll, in addition to forward/backward, left/right, and up/down movements.
“The drone rotation adds a lot of ambiguity to the millimeter wave estimates. This is a big problem because drones rotate quite a bit as they are flying,” says Laura Dodds.
To address this challenge, the researchers integrated data from the drone’s onboard inertial measurement unit (IMU), a sensor that detects acceleration and changes in altitude and attitude. By combining IMU data with millimeter wave reflections from the tag, MiFly can accurately estimate the drone’s full six-degree-of-freedom pose within milliseconds.
The team tested a MiFly-equipped drone in various indoor environments, including their lab, the MIT flight space, and dimly lit tunnels beneath campus buildings. Across all tests, MiFly consistently localized the drone within 7 centimeters, even when the tag was partially obstructed. The system also maintained reliable localization up to 6 meters from the tag.
Future improvements could extend this range through hardware enhancements, such as high-power amplifiers or optimized radar and antenna designs. Researchers also plan to integrate MiFly into a fully autonomous navigation system, allowing drones to independently determine flight paths using millimeter wave technology.
“The infrastructure and localization algorithms we build up for this work are a strong foundation to go on and make them more robust to enable diverse commercial applications,” says Maisy Lam.
Source: MIT NEWS
Cite this article:
Priyadharshini S (2025),” Engineers Develop a System for Drones to Navigate and Determine Their Position in Darkness and Indoor Environments" , AnaTechmaz, pp.125
Recent Post
-

EPFL's Origami-Inspired Robot Revolutionizes Shape-Shifting Technology
In a remarkable feat of engineering, Jamie Paik and her team...
-
Next-Generation Robot Skin: Advancing Robotics and Prosthetics with Smart, Stretchable Sensors
In an innovative collaboration...
-

Are We Ready for Robots to Replace Our Friendly Delivery Folks
The world of deliveries is undergoing a futuristic transformation, with tech giants like Amazon and Walmart...
-

Robotic Chemist Discovers How to Make Oxygen from Martian Minerals
A chemist robot, operating autonomously in a laboratory...
-
Unveiling the Hidden Weaknesses in Soft Robotics: A Closer Look at Conical Shells
Soft robotics, with its squishable and deformable components...
-

A Leap Forward in Material Diversity and Robotic Innovation
The realm of 3D printing has undergone a revolutionary transformation, propelled...
-

Pipeline Inspections with Mobile Robot Technology
In a groundbreaking study, the University of Bristol, under the leadership of Professor...
-

ChromoSense: A Colorful Breakthrough in Robotic Sensing Technology
In the dynamic realm of robotics, researchers at the Reconfigurable...
-
A Snail-Inspired Robot Takes on the Fight Against Ocean Microplastics
In a world grappling with the pervasive issue of plastic pollution, scientists are turning to nature...
-

Unleashing the Dragon Firefighter: A Revolutionary Robotic Solution to Combat Fires
In the world of firefighting, a new and innovative ally may soon join...
-

Drone Technology for Construction Safety
In the realm of drone innovation, Professor Kenji Shimada and his team have achieved a milestone...
-
Meet Mugatu, the Single-Motor Steerable Bipedal Marvel
In the ever-evolving landscape of robotics, breakthroughs are continually reshaping the possibilities...
-

Soft Robotics Offers Hope for Freezing Symptoms of Parkinson’s Disease
Parkinson's disease, affecting over 9 million people worldwide, often brings...
-

The Future of Environmental Monitoring with Plant-Inspired Robotics
In the quest to collect vital climate change data from inhospitable...
-
KAIST's Revolutionary Soft Fluidic Switch: Pioneering Ultra-Low Power Technology for Soft Robotics and Beyond
A team of researchers at the Korea...