
New Algorithm that Allows Human to Assist Robot
Rice University engineers have created a technique that enables people to assist robots in seeing their surroundings and performing jobs. The strategy called Bayesian Learning IN the Dark -- BLIND, is a novel solution to the long-standing problem of motion planning for robots that work in environments where not everything is clearly visible all the time.

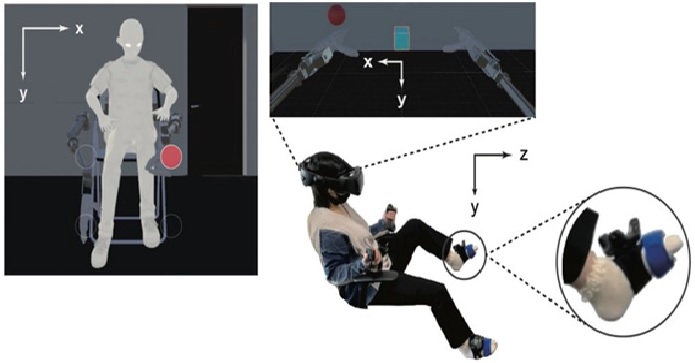
Figure 1: Human assist robots to do their tasks.
Figure 1 shows that the algorithm developed primarily by Quintero-Pena and Chamzas, both graduate students working with Kavraki, keeps a human in the loop to "augment robot perception and, importantly, prevent the execution of unsafe motion." [1]
They combined Bayesian inverse reinforcement learning with established motion planning techniques to assist robots that have “high degrees of freedom” — that is, a lot of moving parts.
To test BLIND, the Rice lab directed a Fetch robot, an articulated arm with seven joints to grab a small cylinder from a table and move it to another, but in doing so it had to move past a barrier. A robot’s programmers have to be specific about the movement of each joint at each point in its trajectory, especially when obstacles block the machine’s “view” of its target.
Rather than programming a trajectory up front, BLIND inserts a human mid-process to refine the choreographed options — or best guesses — suggested by the robot’s algorithm. “BLIND allows us to take information in the human’s head and compute our trajectories in this high-degree-of-freedom space,” Quintero-Pena said. [2]
“We use a specific way of feedback called a critique, basically a binary form of feedback where the human is given labels on pieces of the trajectory,” Quintero-Pena said.
These labels appear as connected green dots that represent possible paths. As BLIND steps from dot to dot, the human approves or rejects each movement to refine the path, avoiding obstacles as efficiently as possible.
“It’s an easy interface for people to use, because we can say, ‘I like this’ or ‘I don’t like that,’ and the robot uses this information to plan,” Chamzas said. Once rewarded with an approved set of movements, the robot can carry out its task, he said.
“One of the most important things here is that human preferences are hard to describe with a mathematical formula,” Quintero-Pena said. “Our work simplifies human-robot relationships by incorporating human preferences. That’s how I think applications will get the most benefit from this work.” [3]
References:
- https://en.prothomalo.com/science-technology/science/humans-in-loop-help-robots-find-their-way
- https://www.zee5.com/articles/scientists-find-humans-in-loop-guide-robots-find-their-way
- https://aljazeera.co.in/politics/scientists-find-humans-in-loop-guide-robots-find-their-way
Cite this article:
Sri Vasagi K (2022), New Algorithm that Allows Human to Assist Robot, AnaTechMaz, pp.222
Recent Post
-

The Geographic Information System (GIS) is Enabling the Agricultural Sector
GIS stands for Geographic Information System. GIS is any digital...
-

The Technology Method of Regenerative Medicine
An orthopaedic implant is a device surgically placed into the body designed...
-
The Technology of Surgical Device: Orthopaedic Implants
An orthopaedic implant is a device surgically placed into the body...
-

The Various Types of Orthopaedic Implants
Now let’s look at the various types of orthopaedic implants and their...
-

NASA’s New Satellite to Analyze Climate Change
NASA’s new shoebox-sized satellite tv for pc referred to as the Compact...
-
VR Device Gives the Sensation of Having Extra Pair of Robot Arms
Doctoral student Ken Arai and Prof Masahiko Inami from the University...
-

3 Key Considerations for the Next Generation of HMI
In the past, a human machine interface (HMI) consisted of a physical...
-

New method causes plastics to break down under UV light
Researchers in the UK have developed a novel method to break down...
-

NHS Trials Medicine Delivery Via Drones
NHS cancer patients will be the first in the world to benefit from...
-
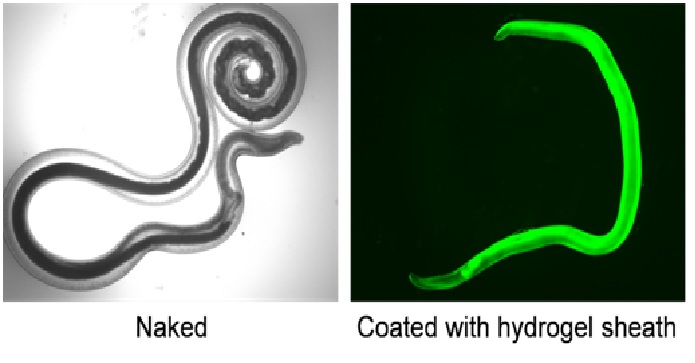
Scientists have created Worms that can Kill Cancer Cells
Researchers at Osaka University found that the worms may be...
-

Smart Contact Lens are the Future of AR
The next revolution in Augmented Reality (AR) seems to be...
-
New Algorithm that Allows Human to Assist Robot
Rice University engineers have created a technique that...
-

New Technique for Imaging mRNA in the Living Mice Brain
A team of researchers led by a University of Minnesota Twin Cities...
-
Stars can Travel Around the Black Hole in Four Years
Researchers at the University of Cologne and Masaryk University in Brno...
-

Benefits of vEPC (virtual Evolved Packet Core)
Virtual Evolved Packet Core (vEPC) is a framework for virtualizing...