
Robotics in NASA
Robotics is the study of robots. Robots are machines that can be used to do jobs. Some robots can do work by themselves. Other robots must always have a person telling them what to do.
How Does NASA Use Robots?
NASA uses robots in many different ways. Robotic arms on spacecraft are used to move very large objects in space. Spacecraft that visit other worlds are robots that can do work by themselves. People send them commands. The robots then follow those commands. This type of robot includes the rovers that explore the surface of Mars. Robotic airplanes can fly without a pilot aboard. NASA is researching new types of robots that will work with people and help them.
What Are Robotic Arms?
NASA uses robotic arms to move large objects in space. The space shuttle's "Canadarm" robot arm first flew on the shuttle's second mission in 1981. The International Space Station is home to the larger Canadarm2. The space shuttle has used its arm for many jobs [1]. It could be used to release or recover satellites. For example, the arm has been used to grab the Hubble Space Telescope on five different repair missions. The shuttle and space station arms work together to help build the station. The robotic arms have been used to move new parts of the station into place. The arms also can be used to move astronauts around the station on spacewalks. The space station's arm can move to different parts of the station. It moves along the outside of the station like an inchworm, attached at one end at a time. It also has a robotic "hand" named Dextre that can do smaller jobs. An astronaut or someone in Mission Control must control these robotic arms. The astronaut uses controllers that look like joysticks used to play video games to move the arm around.
Figure1: introduction to robotics
How Do Robots Explore Other Worlds?
Robots help NASA explore the solar system and the universe. Spacecraft that explore other worlds, like the moon or Mars, are all robotic. These robots include rovers and landers on the surface of other planets. The Mars rovers Spirit and Opportunity are examples of this kind of robot [2]. Other robotic spacecraft fly by or orbit other worlds and study them from space. Cassini, the spacecraft that studies Saturn and its moons and rings, is this type of robot. The Voyager and Pioneer spacecraft now traveling outside Earth's solar system are also robots.
Unlike the robotic arm on the space station, these robots are autonomous. That means they can work by themselves. They follow the commands people send. People use computers and powerful antennas to send messages to the spacecraft. The robots have antennas that receive the messages and transfer the commands telling them what to do into their computers. Then the robot will follow the commands.
How Does NASA Use Robotic Airplanes?
NASA uses many airplanes called UAVs. UAV stands for unmanned aerial vehicle. These planes do not carry pilots aboard them. Some UAVs are flown by remote control by pilots on the ground. Others can fly themselves, with only simple directions. UAVs provide many benefits. The planes can study dangerous places without risking human life [3]. For example, UAVs might be used to take pictures of a volcano. A UAV also could fly for a very long time without the need to land. Since they do not carry a pilot, UAVs also can be smaller or more lightweight than they would with a person aboard.
How Can Robots Help Astronauts?
NASA is developing new robots that could help people in space. For example, one of these ideas is called Robonaut. Robonaut looks like the upper body of a person. It has a chest, head and arms. Robonaut could work outside a spacecraft, performing tasks like an astronaut on a spacewalk. With wheels or another way of moving, Robonaut also could work on the moon, or another world. Robonaut could work alongside astronauts and help them.
Another robot idea is called SPHERES. These are small robots that look a little like soccer balls. The current SPHERES are being used on the space station to test how well they can move in microgravity. Someday, similar robots could fly around inside the station helping astronauts [4].
NASA also is studying the possibility of other robots. For example, a small version of the station's robotic arm could be used inside the station. A robot like that might help in an emergency. If an astronaut were seriously hurt, a doctor on Earth could control the robotic arm to perform surgery. This technology could help on Earth, as well. Doctors could use their expertise to help people in remote locations.
Robots also can be used as scouts to check out new areas to be explored. Scout robots can take photographs and measure the terrain. This helps scientists and engineers make better plans for exploring. Scout robots can be used to look for dangers and to find the best places to walk, drive or stop. This helps astronauts work more safely and quickly. Having humans and robots work together makes it easier to study other worlds.
Astronauts could take advantage of local resources while living and working on the Moon and Mars. Robot helpers could help find and extract the resources - water, oxygen, and more - before humans even arrive. NASA has awarded a total of $535,000 to seven teams that competed in the agency's.
Applications of Robotics
- Industries − Robots are used for handling material, cutting, welding, color coating, drilling, polishing, etc.
- Military − Autonomous robots can reach inaccessible and hazardous zones during war. A robot named Daksh, developed by.
- Medicine − The robots are capable of carrying out hundreds of clinical tests simultaneously, rehabilitating permanently.
- Exploration − The robot rock climbers used for space exploration; underwater drones used for ocean exploration are to.
Main article: Electric motor
- The vast majority of robots use electric motors, often brushed and brushless DC motors in portable robots or AC motors in industrial robots and CNC machines. These motors are often preferred in systems with lighter loads, and where the predominant form of motion is rotational [5].
Main article: Linear actuator
- Various types of linear actuators move in and out instead of by spinning, and often have quicker direction changes, particularly when very large forces are needed such as with industrial robotics. They are typically powered by compressed and oxidized air (pneumatic actuator) or an oil (hydraulic actuator) Linear actuators can also be powered by electricity which usually consists of a motor and a leadscrew. Another common type is a mechanical linear actuator that is turned by hand, such as a rack and pinion on a car.
Series elastic actuators
- Series elastic actuation (SEA) relies on the idea of introducing intentional elasticity between the motor actuator and the load for robust force control. Due to the resultant lower reflected inertia, series elastic actuation improves safety when a robot interacts with the environment (e.g., humans or workpiece) or during collisions. Furthermore, it also provides energy efficiency and shock absorption (mechanical filtering) while reducing excessive wear on the transmission and other mechanical components. This approach has successfully been employed in various robots, particularly advanced manufacturing robots[39] and walking humanoid robots.
- The controller design of a series elastic actuator is most often performed within the passivity framework as it ensures the safety of interaction with unstructured environments. Despite its remarkable stability robustness, this framework suffers from the stringent limitations imposed on the controller which may trade-off performance. The reader is referred to the following survey which summarizes the common controller.
References:
- https://www.nasa.gov/.../5-8/features/nasa-knows/what_is_robotics_58.html
- https://www.nasa.gov/audience/foreducators/robotics/lessonplans
- https://www-robotics.jpl.nasa.gov/charter/index.cfm
- https://ntrs.nasa.gov/api/citations/20050166938/downloads/2005016
- https://rapone.arc.nasa.gov/archive/features.php?year=2005
Cite this article:
S. Nandhini Dwaraka (2021), Robotics in NASA, AnaTechmaz, pp. 8
Recent Post
-

Computing Innovations for Future World
Here are a few of the emerging technologies that promise to keep computing performance...
-
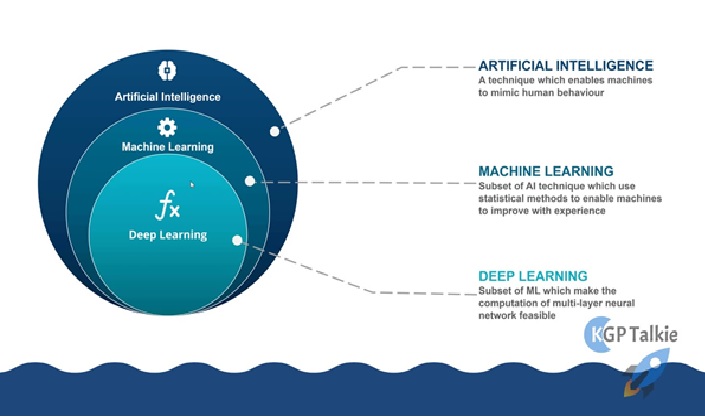
Machine Learning
Machine learning is the concept that a computer program can learn and adapt to new data without human intervention.
-
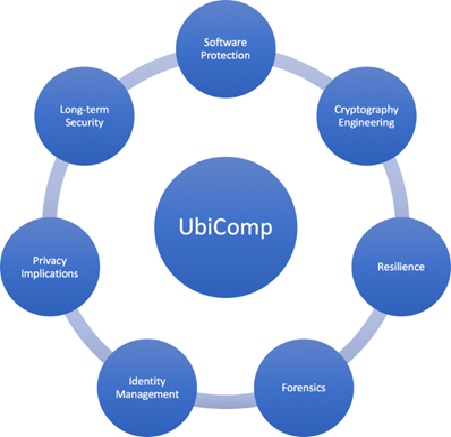
Ubiquitous Computing
Ubiquitous computing is a paradigm in which the processing of information is linked with each activity or object as encountered.
-
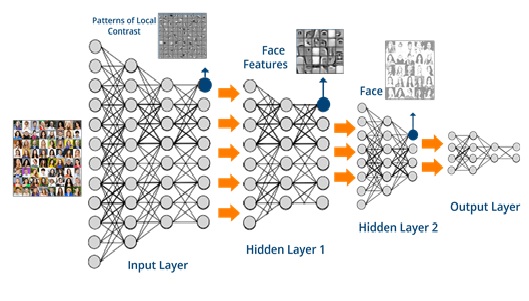
Deep Learning
Deep Learning is a subset of machine learning, which is essentially a neural network with three or more layers.
-
Deep Learning vs Machine Learning
Consider the following definitions to understand deep learning vs. machine learning vs. AI
-
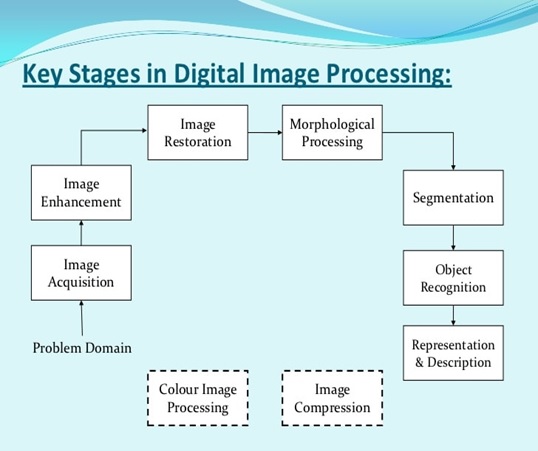
Digital Image Processing
Digital Image Processing Tutorial provides basic and advanced concepts of Image Processing.
-

Haptic Technology
Haptic technology, haptic feedback, or simply haptics, is technology that incorporates tactile experience or feedback as part of its user interface
-
Robotics in NASA
Robotics is the study of robots. Robots are machines...
-
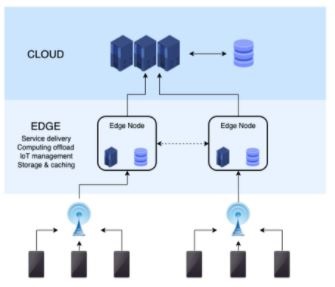
Edge Computing
One definition of edge computing is any type of computer program.
-

Smart Inhalers
COPD affects over 200 million people the world over, and asthma another 300 million.
-

Leep Motion
Leap Motion technology makes it possible to interact with technology using your bare hands.
-

ARCEON – High-Temperature Resistant Composites (HTRC)
ARCEON – High-Temperature Resistant Composites (HTRC) Dutch startup...
-

Axios Stent and Electrocautery
The AXIOS Stent and Electrocautery Enhanced Delivery System is the first and currently the only stent indicated for transgastric...
-

Telemedicine
Telemedicine allows health care professionals to evaluate, diagnose and treat patients at a distance using telecommunications technology...
-

OPUS Materials
Opus Materials Opus Materials Technologies are at the leading edge of novel designer materials. An approach based on a detailed...