
Chiba University’s Novel Foldable Pouch Actuator Enhances Hand Function Recovery
Soft rehabilitation gloves are increasingly used to help patients with hand function-related disabilities recover their finger movement. Traditionally, these gloves use soft pneumatic actuators that rely on air pressure to create movement. Despite advances in design, many of these actuators struggle to provide bidirectional motion, which is crucial for mimicking natural finger joints. They often excel at facilitating finger bending (flexion) but fall short in enabling finger straightening (extension).
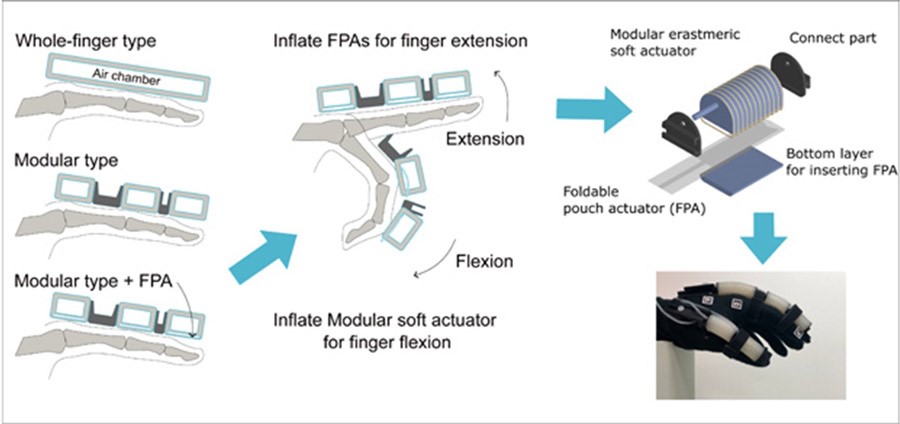
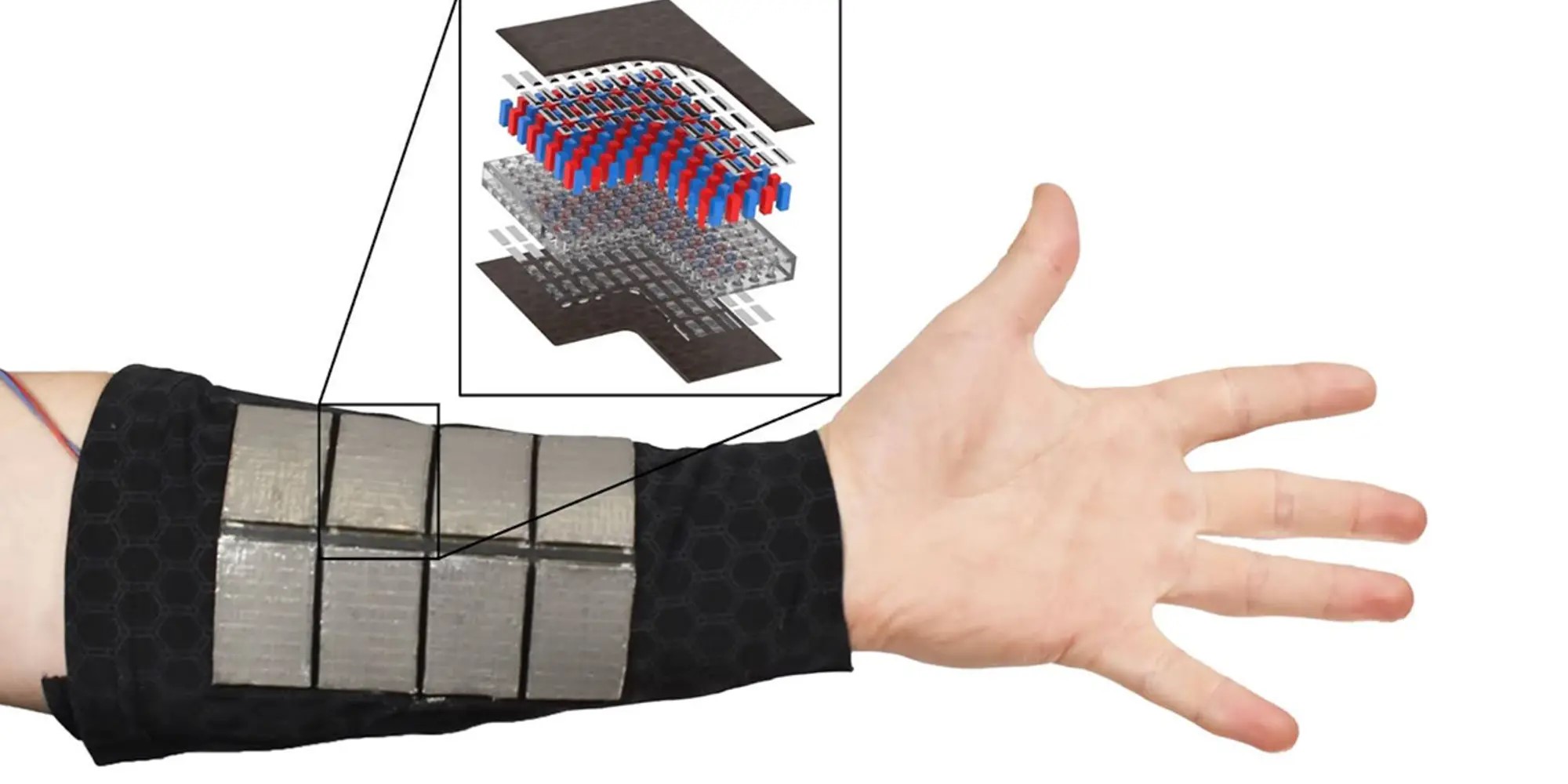
Figure 1. The Proposed Method. (Credit: Professor Wenwei Yu from Chiba University, Japan)
Figure 1 shows the proposed method. However, researchers from Chiba University have made significant strides in overcoming this limitation. Led by Professor Wenwei Yu from the Center for Frontier Medical Engineering, Chiba University, the team also included Dr. Shota Kokubu and Mr. Pablo E. Tortós Vinocour from the Graduate School of Science and Engineering. Their breakthrough was recently published in IEEE Access on April 30, 2024 [1].
Professor Yu explained the motivation behind their study: "Despite having partial hand function, many older people with hand function-related disabilities whom I've come across require the full attention of the healthcare staff. I wondered if an efficient and safe assistive device could bolster their hand function for daily activities, thus helping them enjoy their life better. Imagine their joy in eating their meals using their hands to manipulate spoons or chopsticks!" The newly developed Foldable Pouch Actuator (FPA) brings this vision closer to reality.
The FPA is a groundbreaking innovation in soft actuators. It features a unique foldable, flat structure that expands when pressurized, generating the necessary force for finger extension. This design allows it to work seamlessly with existing soft actuators in rehabilitation gloves, which handle finger flexion through fiber-reinforced elastomer-based mechanisms. Testing on a synthetic finger model demonstrated that the FPA could deliver sufficient torque for both bending and straightening movements—0.17 Newton meters (Nm) for bending and approximately 0.12 Nm for straightening.
The implications of this advanced soft rehabilitation glove design are substantial. Professor Yu points out potential applications: "High-performance modular soft actuators could help hand function restoration in both telerehabilitation and care facility scenarios." He adds, "The new soft actuator has the potential to be used not only for helping rehabilitation but also for assisting daily living activity as assistive devices. Due to its inherent safety, high functionality, and wearability, such assistive devices may play a major role in our aging society." [2]
Looking ahead, Professor Yu suggests that future designs for soft rehabilitation gloves could benefit from improvements in manufacturing precision and control systems to support joint-specific rehabilitation.
In summary, Professor Yu and his team have provided new hope for individuals with hand function-related disabilities worldwide, thanks to the innovative FPA and its integration into enhanced soft rehabilitation gloves.
Source: Chiba University
References:
- https://www.eurekalert.org/news-releases/1051770
- https://www.miragenews.com/foldable-pouch-boosts-finger-extension-in-rehab-1280243/
Cite this article:
Hana M (2024), Chiba University’s Novel Foldable Pouch Actuator Enhances Hand Function Recovery, AnaTechMaz, pp. 272
Recent Post
-

Innovative Plaster Measures Biomarkers in Sweat for Non-Invasive Health Monitoring
Scientists at Nanyang Technological University, Singapore (NTU Singapore) have introduced...
-
Chiba University’s Novel Foldable Pouch Actuator Enhances Hand Function Recovery
Soft rehabilitation gloves are increasingly used to help patients with hand function-related...
-

New ATP Imaging System Sheds Light on Kidney Energy Dynamics and Disease Treatment Potential
The incidence of kidney disease in Japan has been on the rise, now affecting one in eight...
-
Camera System Mimics Human Eye for Enhanced Robotic Vision
University of Maryland computer scientists have created a groundbreaking camera system...
-
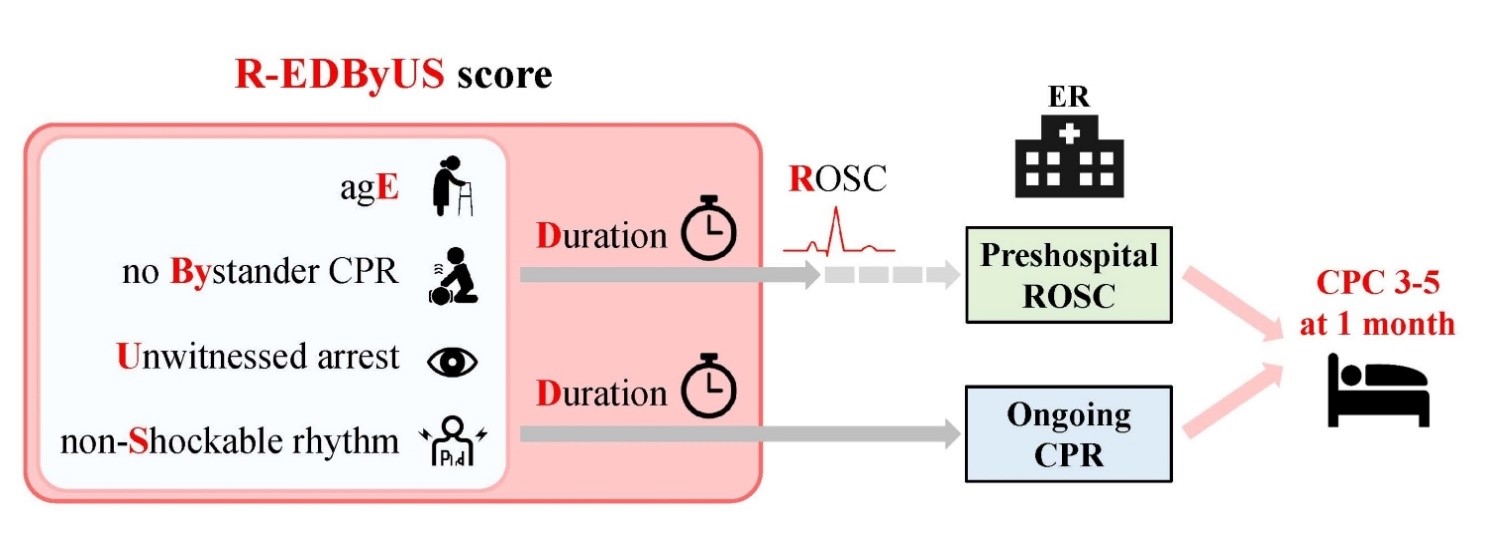
New Scoring Model Predicts Neurological Outcomes in Cardiac Arrest Patients Using Prehospital Data
When treating cardiac arrest, rapid action can mean the difference between life and death....
-
Innovative 3D Model Replicates Human Hair Follicles for Advanced Drug Testing
Hair follicles are intricate structures that surround the hair root, anchoring it to the skin and...
-

The Advantages and Challenges of Incorporating AI into Medical Decision-Making
Researchers at the National Institutes of Health (NIH) found that an AI model achieved high...
-
Powering Healthcare Devices with Body Heat: A Breakthrough in Wearable Tech
In an age where dead batteries can be a major inconvenience, especially for those relying on...
-
Revolutionizing Ear Health: USC's Portable OCT Otoscope Unveils Hidden Ear Pathologies
In the field of ear health, precise diagnosis is essential for effective treatment, particularly...
-
Revolutionary Miniaturized Brain-Machine Interface Set to Transform Communication for the Severely Disabled
Brain-machine interfaces (BMIs) are on the cusp of a breakthrough thanks to researchers at...
-

Exploring Neko Health: Revolutionizing Healthcare with Technology
In today’s rapidly evolving world, technology has permeated nearly every aspect of our lives...
-
Sweat-Powered Wearable Could Revolutionize Personalized Health Monitoring
Imagine continuous, personalized health monitoring being as simple as wearing a Band-Aid...
-
Revolutionary Electrotactile Technology Brings True Touch Sensation to Virtual Worlds
A groundbreaking virtual haptic technology that allows all users to experience the same tactile...
-

Wrist-Worn Voice Recorders Offer Breakthrough in Understanding Balance Loss
Researchers at Virginia Tech are using wrist-worn voice recorders to gather real-time data on...
-

BICAN Unveils Groundbreaking Brain Data, Ushering in a New Era of Neuroscience
The BRAIN Initiative® Cell Atlas Network (BICAN) has released its first major dataset, a...