
Atlas Receives Real-World Upgrade Featuring Superhuman Vision and Ultra-Precise Object Tracking
Boston Dynamics has unveiled a significant advancement in its humanoid robot, Atlas, by integrating a powerful new perception system designed to enhance real-world autonomy.
While Atlas is already known for its remarkable agility, this latest upgrade focuses on boosting the robot’s environmental awareness, enabling it to carry out intricate tasks independently in industrial and manufacturing settings.

Figure 1. Atlas Sporting: The Upgraded Vision Intelligence System.
Smarter Vision for Complex Environments
In real-world environments, robots like Atlas must handle objects that are reflective, dark, or densely packed—conditions that make tasks like picking and placing parts extremely challenging. Boston Dynamics has equipped Atlas with an advanced visual system that combines 2D and 3D perception, object pose tracking, and finely tuned calibration to navigate these challenges effectively. Atlas sporting the upgraded vision intelligence system. Figure 1 shows Atlas Sporting the Upgraded Vision Intelligence System.
2D Detection: The First Layer of Awareness
Atlas begins by using a 2D object detection system to analyze its surroundings. This system detects objects and potential hazards by assigning bounding boxes and keypoints, helping the robot understand what it sees.
In industrial scenarios, Atlas often deals with a wide variety of storage fixtures. The robot uses keypoints on both the exterior and interior of these fixtures—outer keypoints define overall shape, while inner ones identify specific slots. This allows Atlas to accurately locate and interact with individual slots in real time, maintaining a balance between precision and processing speed.
3D Localization Solves Occlusion Challenges
To interact with objects inside fixtures, Atlas estimates its position in relation to them using a dedicated 3D localization module. This system matches visual keypoints with a stored 3D model and uses motion data to maintain consistent accuracy, even when keypoints are blocked or distorted by angles.
By combining both inner and outer keypoints, Atlas creates a dependable estimate of the position and orientation of objects, even when they appear identical [1]. The robot leverages spatial memory and context to distinguish between similar-looking fixtures.
supertracker: Keeping a Grip on Moving Parts
Once Atlas picks up an object, it needs to continuously track it, whether it shifts, slips, or moves out of view. The robot’s SuperTracker system achieves this by integrating visual, kinematic, and force feedback data, ensuring that it stays locked onto its target.
Pose estimation is enhanced with synthetic training data and comparisons between real-world images and CAD models. The system filters out inconsistent predictions using internal validation checks and physical constraints, helping Atlas stay on course with high precision.
Reference:
- https://interestingengineering.com/innovation/boston-dynamics-atlas-vision-upgrade
Cite this article:
Keerthana S (2025), Atlas Receives Real-World Upgrade Featuring Superhuman Vision and Ultra-Precise Object Tracking, AnaTechMaz, pp.365
Recent Post
-
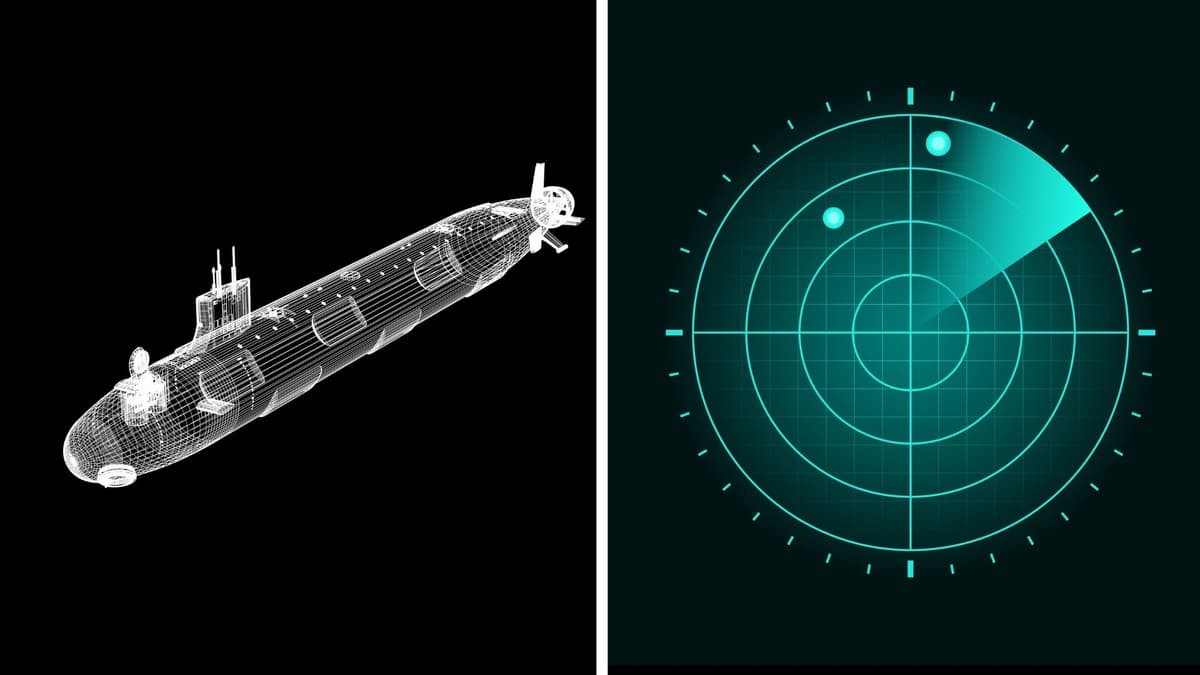
U.S. Technology Could Track Submarines in GPS-Denied, Hostile Environments, Enhancing Military Superiority
As naval threats grow more complex, there’s a rising demand for reliable....
-

Scientists Create Liquid Carbon for the First Time Using High-Power Lasers, Marking A Breakthrough That Could Accelerate Nuclear Fusion Research
In a groundbreaking experiment, a team of researchers led by the University....
-
Scientists Discover a Method to Integrate Diamond Quantum Sensors into Living Cells
Surprisingly, when combined, they pave the way for quantum sensors small....
-

How to Perform a Reverse Image Search Using Google Lens on Any Device
Reverse image search offers a wide range of benefits. It allows users to....
-
Atlas Receives Real-World Upgrade Featuring Superhuman Vision and Ultra-Precise Object Tracking
Boston Dynamics has unveiled a significant advancement in its humanoid....
-

Military Technology Capable of Hacking and Taking Control of Enemy Drones Could Shape the Future of Warfare
Combat drones, while powerful assets in modern warfare, could become....
-

video: High-Powered Laser Takes Down Drone in First-Ever Real Combat Use
In a groundbreaking advancement for directed energy weapons, Israel has become ....