
Robot overcomes uncertainty to retrieve buried objects
For humans, finding a lost wallet buried under a pile of items is pretty straightforward — we simply remove things from the pile until we find the wallet. But for a robot, this task involves complex reasoning about the pile and objects in it, which presents a steep challenge.
MIT researchers previously demonstrated a robotic arm that combines visual information and radio frequency (RF) signals to find hidden objects that were tagged with RFID tags (which reflect signals sent by an antenna). Building off that work, they have now developed a new system that can efficiently retrieve any object buried in a pile. As long as some items in the pile have RFID tags, the target item does not need to be tagged for the system to recover it. [1]

Figure 1. Robot overcomes uncertainty to retrieve buried objects
Figure 1 shows the algorithms behind the system, known as FuseBot, reason about the probable location and orientation of objects under the pile. Then FuseBot finds the most efficient way to remove obstructing objects and extract the target item. This reasoning enabled FuseBot to find more hidden items than a state-of-the-art robotics system, in half the time. [2]
Targeting Tags
The problem in a recent market report inspired our researchers as 90% of US retailers use RFID tagging, but the technology is not universal.
A robotic arm uses an attached video camera and RF antenna with a FuseBot to retrieve an untagged target item from a mixed pile. The system scans the mixed pile with its camera to create a 3D environment model. It sends signals from its antenna to locate RFID tags at the same time. These radio waves can move through most solid surfaces so that the robot can “see” deep into the pile. Since the target item is not tagged, FuseBot knows it cannot locate the item at the same spot as an RFID tag. [3]
Retrieval results
This reasoning, as well as its use of RF signals, gave FuseBot an edge over a state-of-the-art system that used only vision. The team ran more than 180 experimental trials using real robotic arms and piles with household items, like office supplies, stuffed animals, and clothing. They varied the sizes of piles and number of RFID-tagged items in each pile.
In the near future, the researchers are planning to incorporate more complex models into FuseBot so it performs better on deformable objects. Beyond that, they are interested in exploring different manipulations, such as a robotic arm that pushes items out of the way. Future iterations of the system could also be used with a mobile robot that searches multiple piles for lost objects. [4]
References:
- https://indiaeducationdiary.in/robot-overcomes-uncertainty-to-retrieve-buried-objects/
- https://www.sciencedaily.com/releases/2022/06/220628170156.htm
- https://globalbusinessleadersmag.com/robot-overcomes-incertitude-to-regain-buried-objects/
- https://news.mit.edu/2022/robot-pick-place-hidden-objects-0629
Cite this article:
Thanusri swetha J (2022), Robot overcomes uncertainty to retrieve buried objects, AnaTechMaz, pp.260
Recent Post
-

Burning woody biomass in power plants could reduce carbon
The research calculated both economic and environmental factors to provide....
-
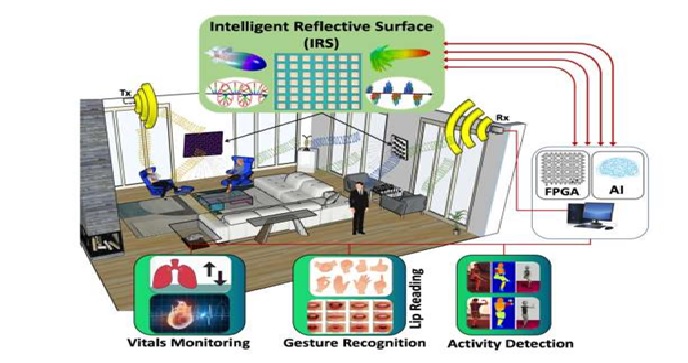
Intelligent wireless walls for contactless in-home monitoring
Patient health care strongly relies on in-hospital situations and remote monitoring......
-

World’s First Industrial Grade 3D Ultrasonic Collision Avoidance Sensor
The Munich-based high-tech startup Toposens is announcing the market launch....
-
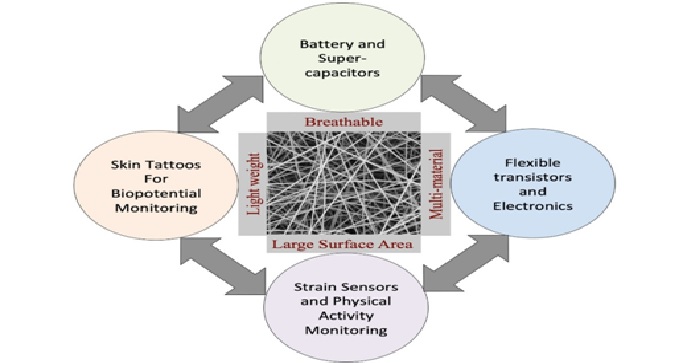
Electrospinning Promises Major Improvements in Wearable Technology
Wearable technology has exploded in recent years. Spurred by advances......
-
Robot overcomes uncertainty to retrieve buried objects
For humans, finding a lost wallet buried under a pile of items is pretty straightforward — we simply .....
-
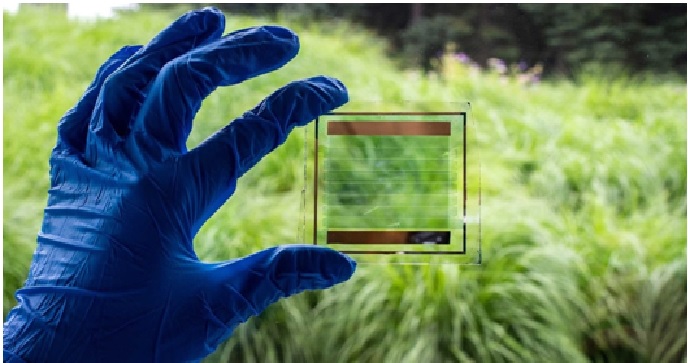
Scientists Develop Transparent Solar Panels that can be used as Windows
A group of researchers has developed a new method for......
-
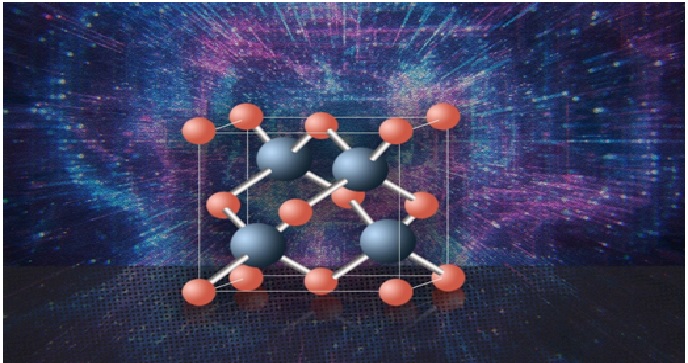
MIT Discovers Semiconductor that can Perform Far Better than Silicon
Semiconductors present in the world now are made of different materials, but one.....
-
World’s First Industrial Grade 3D Ultrasonic Collision Avoidance Sensor
Computers can be trained to better detect distant nuclear detonations.....
-

New Technique Could Lead to Improved Cancer and Lung Disease Drugs
The researchers’ ground-breaking technique may result in ....
-

Physicists Create Mind-Bending New Phase of Matter that acts like two time Dimensions
Physicists have created a remarkable, never-before-seen phase of matter.....
-

Turning Buildings into Batteries to Cheaply Improve Power Quality
In order to ensure that electricity supply and demand are properly balanced......
-
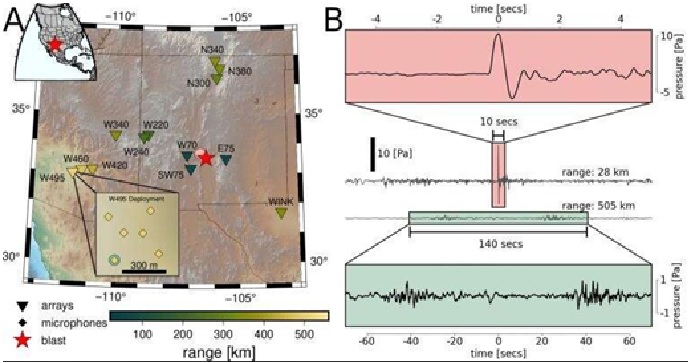
Computers Can Detect Explosion by Learning Synthetic Infrasound Signals
at the Geophysical Institute’s Wilson Alaska Technical Center, and colleagues........
-

Computers Can Detect Explosion by Learning Synthetic Infrasound Signals
Witsil, at the Geophysical Institute’s Wilson Alaska Technical Center, and colleagues.....
-
New Mechanism to Reduce Sensitivity of the Auditory System
Researchers CU Anschutz researchers Andrew Mecca and Giusy Caprara........
-

New Method to Detect Exoplanets Orbiting Violent Dead Stars
The Royal Astronomical SocietyResearchers have suggested a new way.......