
Simple Actuators for Complex Motions
Inflatable soft actuators that can change shape with a simple increase in pressure can be powerful, lightweight, and flexible components for soft robotic systems. But there’s a problem: These actuators always deform in the same way upon pressurization. To enhance the functionality of soft robots, it is important to enable additional and more complex modes of deformation in soft actuators.
Now, researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have taken inspiration from origami to create inflatable structures that can bend, twist and move in complex, distinct ways from a single source of pressure. [1]
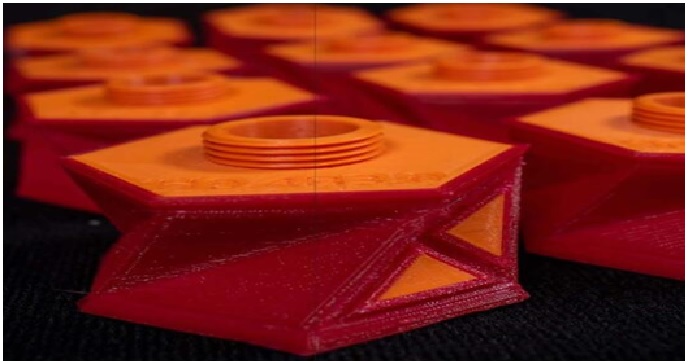
Figure 1. The Simple Actuators for Complex Motions
Figure 1 shows Most of at the moment’s inflatable gentle actuators are monostable, which means they want a relentless enter of strain to take care of their inflated state. Lose that strain and the construction deflates to its solely secure type.
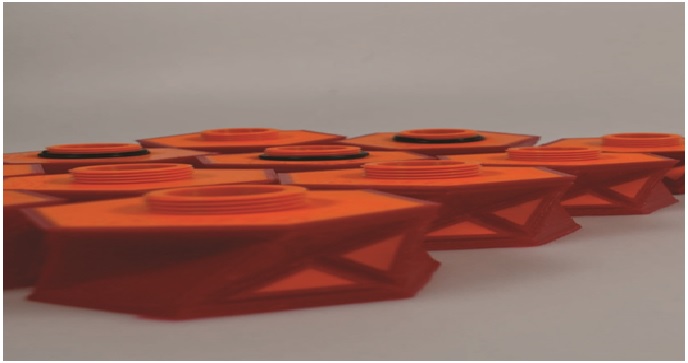
The researchers display an actuator with 12 completely different modules and confirmed that it may possibly carry out completely different complicated motions.
“If you inflate a monostable structure, it always gives you the same deployed shape and it returns to the same initial shape when you release pressure,” stated David Melancon, a former graduate pupil at SEAS and co-first writer of the paper. “In this work, we use bistable origami building blocks to circumvent that limitation.” [2]
“By assembling different modules and tuning their geometry to cause snapping at different pressures, we create structures capable of complex shapes and deformation modes that can be pre-programmed and activated using only one pressure source,” said Melancon, who is currently a postdoctoral research associate at Princeton University.
The researchers built an actuator with 12 different modules and showed that it can perform up to eight different, complex motions. The team also developed an algorithm that can identify the optimal combination of modules for the desired deformation modes.
Since the mechanics at play in the system are driven by geometry, the approach could lead to applications across scales. [3]
References:
- https://techiai.com/complex-motions-for-simple-actuators-inflatable-actuators-use-origami-principles-to-deform-in-intricate-ways/
- https://news8plus.com/complex-motions-for-simple-actuators/
- https://www.eletimes.com/simple-actuators-for-complex-motions
Cite this article:
Thanusri swetha J (2022), Simple Actuators for Complex Motions, AnaTechMaz, pp.254
Recent Post
-

Xbox Series S India Price Rising Nearly 6 Percent to Rs. 36,990
Xbox hardware prices are reportedly rising in India — from June 30......
-
Design surfaces that make water boil more efficiently
The boiling of water or other fluids is an energy-intensive step at the heart of a wide range of industrial .....
-
A paper-thin loudspeaker
A typical loudspeaker found in headphones or an audio system uses electric current inputs that pass through a coil of wire......
-

Saffron: A Safe and Effective Natural Therapy for Arthritis Sufferers
The main and primary function of the screw which is used for the bone .....
-

Boot Maker Developed Smart Boot for Healthcare Workers
Monash’s Design Health Collab and SensiLab partnered with Blundstone Australia.....
-
Origami Inflatable Structures to Deform Soft Robots in Different Ways
Researchers from the Harvard John A. Paulson School of Engineering and Applied.....
-
Researchers Revealed an Unexpected Feature of Atomic Nuclei
MIT researchers Adam Vernon and Ronald Garcia Ruiz, alongside....
-
Two Dimensional Iconic Liquids to Capture CO2
A group led by Profs Suojiang Zhang and Hongyan He from the Institute of Process Engineering (IPE).....
-
Wristwatch Style Health Monitor Works Without Battery
researchers at the University of California, invented a new self-powered, wristwatch-style .....
-

A New Antibiotic Can Kill Even Drug-Resistant Bacteria
A brand-new antibiotic that was developed at the Rockefeller University using computational models of.....
-

Harnessing the True Potential of Blockchain Technologies
Robert Brunner is the associate dean for innovation and chief disruption officer.......
-

Push to Open Up ‘Black Box’ of Language Models Amid Rapid Growth in AI Capabilities
The tech industry's latest artificial intelligence constructs can be pretty......
-
Self-Organising Laser Can Mimics Living Materials, Reconfigures in Changing Conditions
Researchers have developed a self-organising laser system that ....
-
Simple Actuators for Complex Motions
Inflatable soft actuators that can change shape with a simple increase in pressure can be powerful,.......
-
A deep learning technique to generate DSN reinforcement attacks
Deep learning techniques have recently shown promise for detecting......